
正弦波フィルター vs. 長いケーブルの VFD アプリケーション向けの dV/dT フィルター: 現場での直接比較 — Mirus International
| クライアント | サンアントニオ水道局 — 給水所 |
| 応用 | ダウンホールウォーターポンプモーター — 800 FT (245 M) ケーブルの深さ |
| テストされたサイト | 1 の 6 同一のインストール (最も故障率の高いサイトが選択されました) |
| 故障履歴 | 平均故障間隔 6 ~ 12 か月; 曲がりくねったフラッシュオーバー + ベアリングの溝が観察される |
| VFDスイッチング周波数 | 2 kHzの |
| オリジナルフィルター | LRC dV/dTフィルター |
| テストフィルター | Mirus AUSF INVERSINE 正弦波フィルター |
| 試験日 | 3月 31, 2016 |
| フォローアップ (12月 2020) | すべてのモーター/ポンプの故障がゼロ 6 のサイト 4+ INVERSINE 導入から数年 |
01 動作コンテキスト: ダウンホールモーター, 800-フットケーブル, 繰り返される障害
サンアントニオ水道局は、可変周波数ドライブを使用してダウンホールポンプモーターを制御するウォーターリフトステーションを運営しています。. モーターはおよその位置に取り付けられています 800 足 (245 M) 地面の下 - ドライブ自体が完全に動作している場合でも、重大な VFD 出力波形の問題を引き起こすのに十分な長さのケーブル配線. 6 つの同一の設備でモーターとポンプの故障が繰り返し発生していました, 平均故障間隔 6 へ 12 月. 故障した機器の故障後の検査により、2 つの異なる損傷の痕跡が明らかになりました: 曲がりくねったフラッシュオーバー (ディファレンシャルモード誘電応力を示す) ベアリング溝加工 (コモンモード電流を示す).[1]
各設置には標準の LRC dV/dT フィルターが装備されていました。これは、長い VFD ケーブル配線に対する従来のソリューションです。. dV/dT フィルターは障害を防止できませんでした. 研究されている問題は、正弦波フィルターの方がパフォーマンスが良いかどうかということでした。, もしそうなら, どの程度 — メーカーの仕様書ではなく、現場での直接測定によって定量化されます.
02 dV/dT フィルターでできることとできないこと
2.1 dV/dTフィルターの仕組み
dV/dT フィルターは、VFD 出力とモーター ケーブルの間に挿入される LRC ネットワークです。. その目的は、各 PWM 電圧パルスの立ち上がり時間を遅くし、dV/dT を低減することです。 (電圧変化率) — パルスがケーブルとモーターのインピーダンスに対して階段関数のように見えないようにするため. 二次回路の固有共振周波数を離調することにより, 反射波の過電圧と共振状態の深刻さを軽減します。.[1]
できないこと: PWM波形は除去されません. 出力は依然として一連のパルスであり、エッジで遅くなります。, ただし、依然として正と負の DC バス レベルが切り替わります。 2 kHzの. ケーブルとモーターの絶縁に対する基本的な PWM 差応力は軽減されますが、排除されるわけではありません。. スイッチング周波数に関連する高周波電流高調波は依然としてモーターに存在します。.
2.2 コモンモードの問題 — dV/dT では対処できないもの
VFD システムのコモンモード電流は、3 つの出力相すべてから同時に浮遊容量を通って、ケーブル ジャケットを通ってグランドに流れます。, モーターフレーム, ベアリング, およびシステムアースへのその他の導電パス. ディファレンシャルモードとは異なります (フェーズ間) 現在. モーターベアリングを流れるコモンモード電流により放電加工が発生します (放電加工) ベアリングレースの損傷 — フルーティングと呼ばれる損傷パターン, これはサンアントニオの故障したベアリングで観察されました.[1]
Eaton の Application Paper AP043001EN に記載されているとおり, dV/dT フィルタはコモンモード制御には最適な選択ではない可能性があります, 正弦波フィルターの方が適切かもしれません. 長いケーブルの場合, コモンモード電流はケーブル長に沿って流出します, ケーブル長が短い場合よりもモーターの位置が低くなりますが、800 フィートのケーブルの場合, コモンモード電流分布とその軸受への影響は複雑であり、ケーブルの長さだけで単純に低減できるものではありません。.[1][2]
コモンモードノイズ: 全相からグランドへの電圧ストレスを同時に印加, ドライブベアリングの電流障害. メカニズム - ケーブル導体とシールド/外装間の浮遊容量, モーターのベアリングを通ってアースに流れる電流を生成します。.
dV/dT フィルターは差動モードに部分的に対処します. 正弦波フィルターは差動モードに完全に対処し、部分的なコモンモードの軽減を提供します。. 完全なコモンモード制御用, コモンモードチョークを統合した正弦波フィルタが適切なソリューションです.
03 フィールドテストプロトコル: 3つの測定点, ワンドライブ
試験は3月に行われました 31, 2016 マイク・マグロウ著 (株式会社NSOEM) そしてアーロン・セクラ (ファイブスターエレクトリック), AEMC を使用する 8335 電力品質メーター — 正確に測定できるという理由で特別に選択されました 3 kHzの (50次高調波), をカバーする 2 このアプリケーションの主な問題となる kHz スイッチング周波数高調波. テストでは、連続する 3 つのポイントで波形と高調波の状態を測定しました。:[1]
- ポイント 1: VFD インバーター出力 — 既存の dV/dT フィルターの上流 (ベースラインのドライブパフォーマンス)
- ポイント 2: 既存の dV/dT フィルターの出力 (現在の標準設置性能)
- ポイント 3: Mirus INVERSINE AUSF 正弦波フィルターの出力, dV/dTフィルターの代わりに設置

イチジク. 1. サンアントニオ水道局の揚水ステーション — テストされた 6 台の同一の VFD 駆動ダウンホールポンプ設備のうちの 1 台. ソース: ミラス・インターナショナル / NSOEM株式会社.[1]
3.1 ポイント 1 — VFD出力ベースライン
インバーター出力測定により、通常のドライブ動作が確認されました - 共振はありません, 位相の不均衡, またはその他の障害状態. VFD は仕様の範囲内で動作していました. 特徴的な鋸歯状の電流波形とドライブ出力での高い THDv は、適切に動作している典型的なものです。 2 kHz PWM インバータ.[1]
| 段階 | THDi (腕) | THDv (Vrmsの) |
|---|---|---|
| A | 11.36% (136 A) | 37.91% (467 で) |
| B | 10.63% (132 A) | 38.74% (470 で) |
| ℃ | 10.46% (131 A) | 37.94% (467 で) |
真の力率 0.575 対. 変位力率 0.785 重大な高調波無効電力を示します (kVAR = 100.4) 描画中 – 無効電力測定に寄与する測定点の下流に dV/dT フィルタの容量性リアクタンスを備えた典型的な VFD 出力回路.
04 測定結果: 数字が物語る
4.1 ポイント 2 — dV/dT フィルター出力
dV/dT フィルターは電圧歪みをわずかに改善しただけであり、THDv は約 38% から約 34% に低下しました。. 電流波形は依然として PWM スイッチングの特徴である鋸歯状パターンを示していました。. 高周波電流高調波は、 2 kHz のスイッチング周波数は維持されたまま. 真の力率は従来よりわずかに改善されました 0.575 へ 0.597.[1]
4.2 ポイント 3 — INVERSINE 正弦波フィルター出力
| 段階 | THDi (腕) | THDv (Vrmsの) |
|---|---|---|
| A | 7.24% (132 A) | 3.08% (412 で) |
| B | 8.05% (134 A) | 3.79% (413 で) |
| ℃ | 8.60% (139 A) | 4.17% (413 で) |
PWM 波形はフィルター出力で完全に除去され、クリーンな正弦波に置き換えられました。. 電圧歪みが低下しました 34%+ (dV/dT) 最大まで 4.17% すべての段階で — 87.9 ~ 90.9% の削減. 無効電力消費量は 96.39 kVAR 2 28.73 KVAR, A 70.1% 削減, 真の力率を改善 0.597 へ 0.660.[1]
4.3 完全な比較
| パラメータ | インバータ出力 (dV/dT の上流) |
dV/dTフィルター出力 | インバーサイン出力 | 改善 インバーシン vs. dV/dT |
|---|---|---|---|---|
| THDi | 10.46 - 11.36% | 10.61 - 11.32% | 7.24 - 8.60% | 24–32%削減 |
| I RMS | 131 - 136 A | 131 - 137 A | 134 - 139 A | +1.4-2.3% (わずかな増加) |
| THDv | 37.91 - 38.74% | 34.10 - 34.71% | 3.08 - 4.17% | 88–91%削減 |
| V実効値 | 467 - 470 で | 450 - 451 で | 412 - 413 で | 8.4% 下 - 52 ~ 55 Hz の動作に適しています |
| KVAR | 100.4 KVAR | 96.39 KVAR | 28.73 KVAR | 70.1% 削減 |
| 真のPF | 0.575 | 0.597 | 0.660 | +10.6% 改善 |
4.4 4年間の追跡調査
このケーススタディで最も説得力のあるデータ ポイントは、テスト時ではなく 4 年後に記録されました。. INVERSINE フィルターは、6 か所のリフト ステーション サイトすべてに導入されました。 2016. 12月現在 2020 — この記事の執筆時点 — 6 つのサイトのいずれでも、モーターまたはポンプ パッケージの故障は記録されていませんでした. 以前の平均故障間隔と比較して、 6 へ 12 月, これは、4 年間の観察期間を通じて繰り返し発生する故障モードが完全に排除されたことを意味します。.[1]
05 インバーシンの違い: チューニング周波数が重要な変数です
INVERSINE AUSF は単なる正弦波フィルターではなく、従来製品とは根本的に異なるチューニングアプローチを採用した正弦波フィルターです。. サンアントニオで観察されたパフォーマンスの違いは、このチューニングの選択の直接的な結果でした.[1]
5.1 なぜ 600 Hzチューニングが不十分です
ほとんどの正弦波フィルターは、 60 Hz アプリケーションは近くに調整されています 600 Hz — 10次高調波. これにより、フィルタのカットオフ周波数が基本波よりも十分に高く、ドライブのスイッチング周波数よりも低くなります。. しかしながら, 600 Hz は、スイッチング周波数の高調波が発生するスイッチング周波数領域に十分近いです。 2 kHz以上は完全に減衰されない. 残留高周波電圧成分がフィルタ出力に残ります - 50 次高調波以上で測定可能 (3,000 Hz 60 Hz系). この残留成分は二次回路に誘電ストレスと熱ストレスを与え続けます。.
5.2 INVERSINE チューニング アプローチ — およそ 180 ヘルツ
INVERSINE は基本周波数の約 3 倍に調整されています。 180 Hz 60 Hz系. これは、 2 kHz スイッチング周波数, すべてのスイッチング周波数高調波を大幅に減衰します。. 結果は次の条件を満たすフィルター出力になります。 <5% 100次高調波まで測定してもTHDv (6,000 Hz 60 Hz系) — 従来のもの 600 Hz 調整フィルターが 50 次高調波を超えることはほとんどありません.[1]
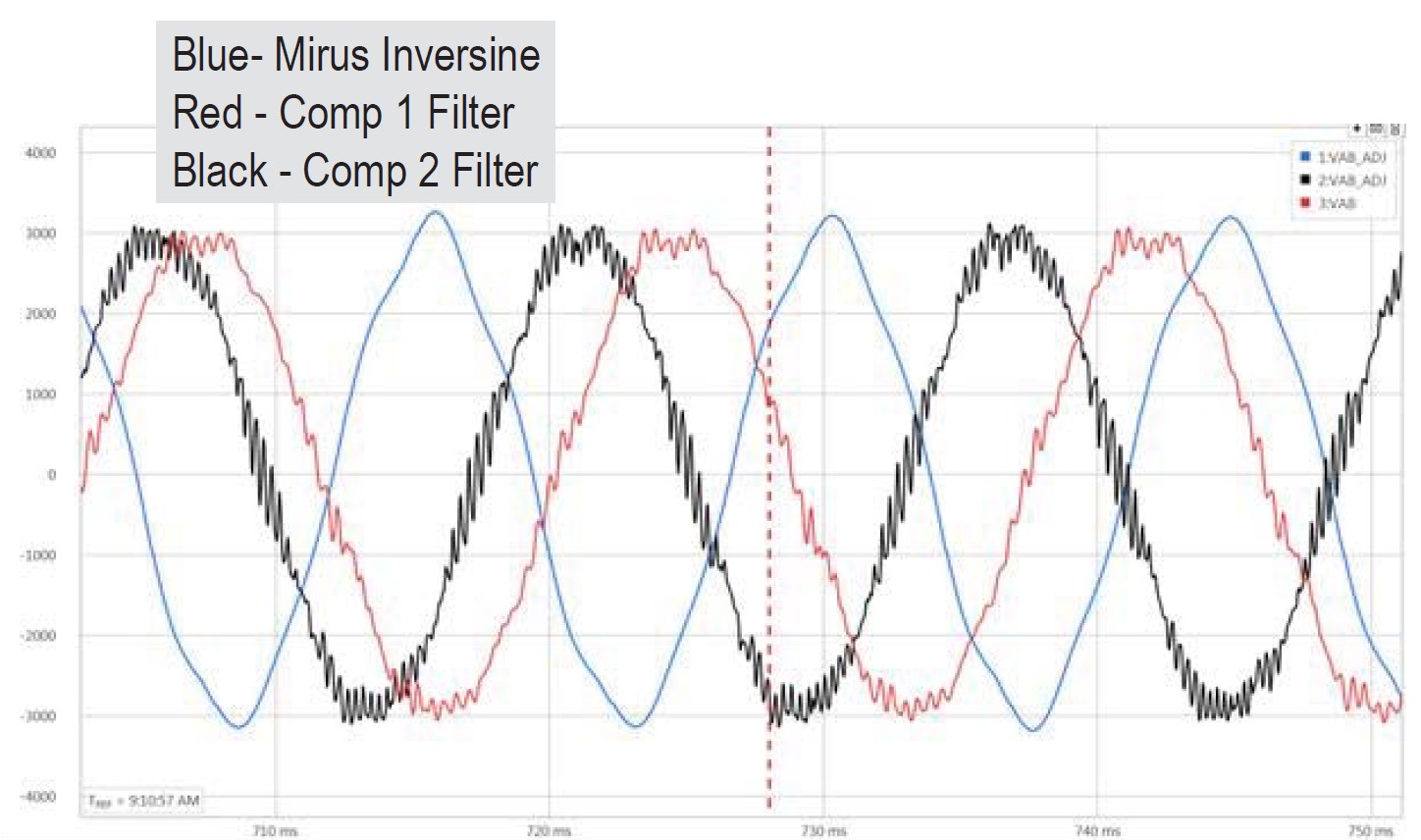
イチジク. 2. 3ウェイ正弦波フィルター出力比較: デス・インバース (ブルー) 対. 競合他社 1 (赤) 対. 競合他社 2 (黒). INVERSINE チューニングによる高周波電圧ノイズの除去がはっきりとわかります。. 従来の 600 Hz 調整フィルターで残留高周波リップルが表示される. ソース: ミラス・インターナショナル.[1]
5.3 INVERSINE のその他の利点と比較. 従来の正弦波フィルター
- 力率補正: INVERSINE コンデンサは、モーターの誘導無効電力の大部分を供給できるサイズに設計されています。, インバータ出力の変位PFをほぼ1に改善. 従来のフィルターは PF 補正用に設計されていないため、モーターの PF は遅れたままになります。.
- 挿入損失の低減: INVERSINE の電圧降下は以下です 3%, 対. 5競合フィルターの場合 -12%. 挿入損失が低いということは、モーターが受ける端子電圧が高いことを意味します, 電流とそれに伴う損失の削減.
- ダンピング抵抗なし: 同調周波数が低いため、従来の設計ではダンピング抵抗が必要だった共振条件が排除されます。. 抵抗器は挿入損失を追加し、熱を発生します。INVERSINE では抵抗器が存在しないため、より効率的かつシンプルになります。.
- 自然対流冷却: 低損失設計により、一部の競合製品で必要とされるファン冷却ではなく、自然対流冷却が可能となり、メンテナンス要件が軽減されます。.
- 効率の利点: 1.5競合する正弦波フィルターよりも効率が –2% 高い, 運用コストを直接削減する.
06 電力品質の観点: このケーススタディが示すもの
6.1 部分的な解決策としての dV/dT フィルター
サンアントニオの事例は、このシリーズの前半の ESP モータの事例研究で理論的に確立されたことを実測データで実証しています。: dV/dT フィルタは、長い VFD ケーブル アプリケーションにとっては不完全なソリューションです. 電圧パルスの dV/dt が減少し、それによって反射波の過電圧が軽減されますが、PWM 波形は除去されません。, また、高周波電圧スイッチング内容に関連する連続差動モード誘電ストレスには対応していません。.
dV/dTフィルター 34% THDv出力対. インバーシンの 4% THDv 出力はこのストーリーを直接伝えます. A 34% モーター端子の THDv は、モーター絶縁システムが設計動作条件をはるかに上回る電圧高調波によって継続的にストレスを受けていることを意味します。. 個々のパルス過電圧が低減されても, 6 ~ 12 か月にわたる累積的な誘電ストレスは、巻線のフラッシュオーバー故障を引き起こすのに十分です.
6.2 結果による指定, 慣習に従ってではない
このケーススタディの結論は、具体的な仕様の推奨事項です。: ケーブル長が長い VFD/ASD 二次回路用, 最大THDvを指定 ≤ 5% かつ最大THDi ≤ 8% 単純にではなく、モーター端子の全負荷時 “dV/dTフィルターを取り付けてください。” パフォーマンス仕様により、特定のアプリケーション条件には不適切な可能性がある従来の答えを適用するのではなく、実際の問題に対処するソリューションが強制されます。.
6.3 メーカーの主張を覆すフィールドテストの主張
サンアントニオのテストは、メーカーの仕様に依存するのではなく、フィールドで測定されたデータを生成するように明示的に設計されています。. 著者らが指摘したように, dV/dT フィルタの文献では、コモンモードの低減やモータの寿命延長について、それらをサポートする技術データを提供せずに主張することがよくあります。. 3点測定プロトコル - インバータ出力, dV/dT出力, 正弦波フィルター出力 - 同じドライブとケーブル上の同一動作条件下で直接比較可能なデータを生成. これは競合するフィルター技術を評価する正しい方法です, そして結果は明白でした.
参照
- [1] M. マグロウ (NSOEM株式会社. / ミラス・インターナショナル) そしてA. 一度もない (ファイブスターエレクトリック), “Mirus シリーズ AUSF 逆正弦波フィルターと dV/dT フィルターの比較: サンアントニオ水道局の事例レビュー,” 技術事例レビュー, 株式会社ミラスインターナショナル, ブランプトン, オンタリオ, カナダ, 12月 2020. 利用可能: mirusinternational.com/inversine
- [2] イートンコーポレーション, “AFD を使用した dV/dT フィルターの適用,” アプリケーションペーパー AP043001JA, 9月発効 2014.