
海洋任務の高調波緩和がオフショアサービス船舶プログラムを救う — Mirus International
| 応用 | オフショア供給およびサービス船 - DC 電気推進 |
| ドライブ | 4 3,000 HP DC推進ドライブ + 1つ 1,500 HP 格納式バウスラスター DC ドライブ |
| ディストリビューション | 600 で / 480 V 船舶動力システム, 複数のジェネレータ |
| 動作モード | 動的位置決め (DP) — 安全性が重要, 不安定性に対するゼロトレランス |
| プレフィルターTHDv | まで 20.89% — すべての基準を超えました, 機器の故障を引き起こした |
| 高調波フィルター | ミラスMOSリネーター タイプT (海洋およびオフショアに特化した) |
| ポストフィルターTHDv | < 8% あらゆる動作条件下で - ABS 準拠 |
| 認証機関 | アメリカ海運局 (ABS) |
01 動作コンテキスト: 仕事に行けなくなった船
海洋石油・ガス産業の作業範囲を拡大するために、直流電気推進を備えた海洋供給およびサービス船を購入およびアップグレードしました。. アップグレードには強化されたナビゲーションシステムが含まれていました, 容量を増やした遠隔操作車両 (ROV) 機器, クレーンとリフトシステムのアップグレード. 意図は単純だった: より有能な船, より多くの収益を生み出す契約.[1]
結果は逆でした. 新しい機器は元のシステムよりも電圧歪みに対してはるかに敏感であることが判明しました. 海上試験中, 電圧高調波歪みレベルを超えています 20% ダイナミックポジショニング動作中 (DP) モード — オフショアオペレーターが掘削リグや生産プラットフォームの近くで作業するために必要とする正確なステーション維持機能. 連鎖する失敗: ナビゲーションシステム, クレーン制御, および ROV 機器はすべて動作上の問題とコンポーネントの故障を経験しました. 船舶は海上試験に合格できず、オフショア契約を受け入れることができませんでした.[1]
この船は現在のアメリカ海運局よりも古いものでした。 (ABS) 高調波ガイドラインであり、古い規格の下で廃止されました. アップグレードを指定した場合, 高調波コンプライアンスは設計要件ではありませんでした. 海上試験中に故障が発生した後でのみ、船舶を就航させるための前提条件として高調波の緩和が検討されました。.[1]
02 既存の緩和策が失敗した理由
この船舶には高調波緩和策がなかったわけではありません。この船舶には、インピーダンス整合されたインダクタと並列に動作する移相変圧器で構成される既存のスキームがありました。. 擬似的なマルチパルス配置です: 個々のドライブグループへの供給を位相シフトすることにより, その目的は、異なるグループからの高調波電流を共通電源バス内で打ち消すことです。.
この方式では電圧歪みを許容レベルまで低減できませんでした, 振り返ってみれば、これは予想できたことだ. 位相シフト擬似マルチパルス戦略は、個々のドライブ グループからの高調波電流の大きさが等しく、キャンセル ポイントでの位相が逆であることに依存します。. これは、一貫した高調波シグネチャを持つ PWM タイプの ASD ではかなりうまく機能します。. サイリスタベースの DC ドライブには機能しません.[1]
異なる負荷で同時に動作する 5 つの DC ドライブにわたる可変高調波成分の組み合わせ, プラス整流ノッチ, を生み出した 20%+ 海上試験中に測定されたTHDv. 既存の緩和策は単にサイズが小さかっただけではなく、アプリケーションにとって間違ったテクノロジーでした.
03 DC ドライブと整流ノッチ: 失敗の背後にあるメカニズム
3.1 サイリスタの整流によって電圧ノッチが発生する仕組み
サイリスタ DC ドライブは AC 電源電圧を整流し、制御された DC バスを生成します。. 各転流イベント、つまりあるサイリスタから次のサイリスタに伝導が移行するとき、AC 電源の 2 つの相が導通しているサイリスタを介して事実上短絡される短い期間が発生します。. 駆動入力の供給電圧は、転流オーバーラップ角度の継続中にゼロ近くまで低下します。. これは電圧ノッチです.[2]
電圧ノッチは供給ネットワークに伝播し、同じバス上の共通結合のあらゆる点に発生します。. 深刻度はソースのインピーダンスに依存します。インピーダンスが高いほど、, ノッチが深くて広いほど. 電源インピーダンスが比較的高い船舶電力システムの場合 (電力網ではなく発電機), ノッチは深刻で、接続されているすべての機器に同時に影響を与えます.
3.2 なぜノッチが機器の故障を引き起こすのか
電圧ノッチは高周波です, 高振幅の妨害. デジタル制御システム — ナビゲーション コンピューター, クレーン PLC コントローラー, ROV 駆動電子機器 - 同期とタイミングのために供給電圧をサンプリングします. 間違った瞬間の電圧ノッチはゼロクロスとして解釈される可能性があります, タイミングエラーの原因となる, 誤ったトリガー, または完全な故障トリップ. これは、この船のクレーン制御と ROV 機器を無効にする故障モードです: 持続的な高調波による熱損傷がない, しかし、一時的なノッチングによる制御システムの混乱.[1]
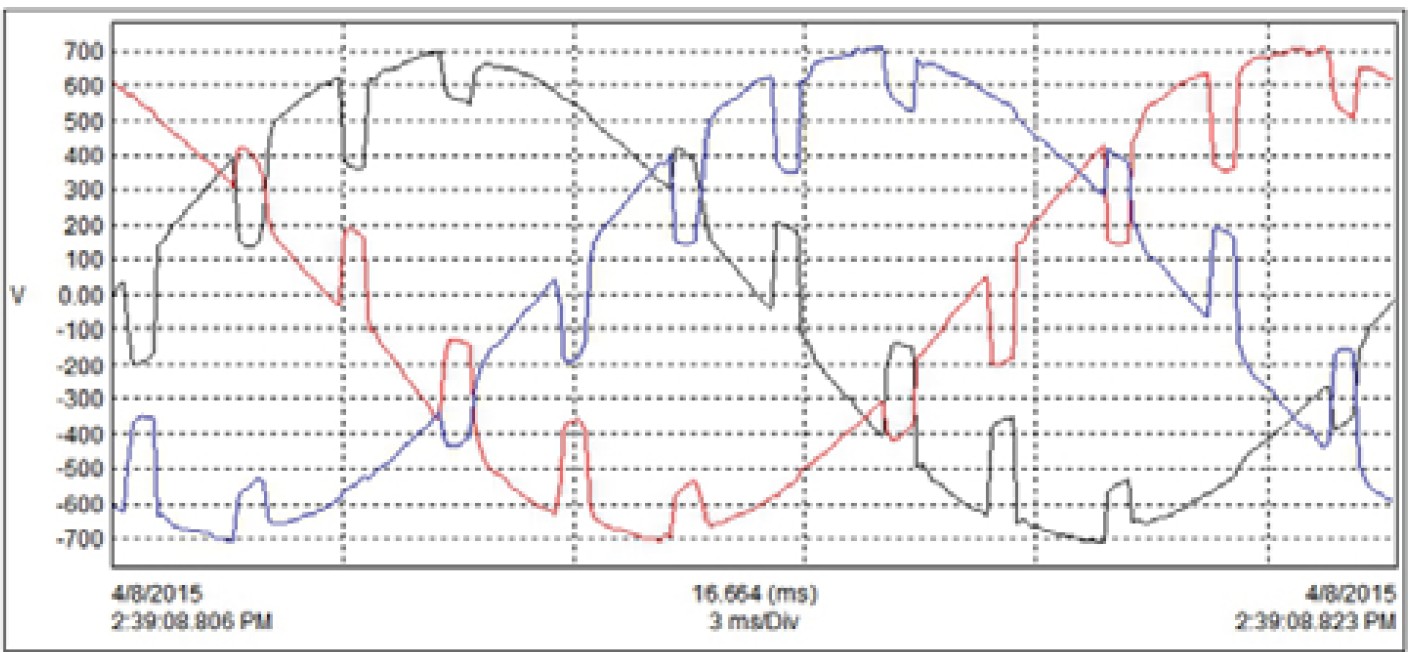
イチジク. 1. 480最悪の場合の V バス電圧波形 — 2 つのジェネレータ, 100% 推進速度, バスタイが開いた状態. THDv = 20.89%. 激しい波形歪みと転流ノッチがはっきりと確認できます。. ソース: ミラス・インターナショナル.[1]
3.3 シミュレーション画像 — SOLV™ 分析
緩和戦略に取り組む前に, Mirus と NSOEM は、システム全体にわたる船舶の完全なレビューを実施し、Mirus を使用しました。’ 独自のSOLV™ 完全な船舶電気システム (発電機) をモデル化する高調波シミュレーション ソフトウェア, 配電変圧器, さまざまな動作点での DC ドライブ, 提案されたフィルタ構成. シミュレーション ワークフローには 2 つの段階がありました:[1]
- プレフィルターベースライン — 元の機器を使用して分電盤でTHDvをシミュレート: 13% 左舷だけで, 現場での測定結果と一致する
- フィルター後の予測 — 各 DC ドライブで MOS Lineator を使用して THDv をシミュレート: 5.8% — ABS の範囲内に十分収まる 8% 限界
初期シミュレーションとフィールドで測定されたプレフィルター条件が緊密に一致しているため、ソフトウェア モデルが検証されました。. これにより、ハードウェアを注文または設置する前に、フィルタ後のシミュレーション結果が信頼できるという確信が得られました。.
04 ソリューション: MOS Lineator — 船舶用フィルター設計
4.1 なぜ海洋専用フィルターなのか
標準的な工業用高調波フィルタは海洋用途には適していません. 環境 - 振動, 塩気, 湿度, 温度サイクル - 異なる構造が必要. 海洋分類機関 (ABS, DNV, ロイズレジスター) 船舶に設置される電気機器に特定の要件を課す, 高調波フィルターを含む.[3] ミラス・モス (海洋およびオフショアに特化した) Lineator は、標準 Lineator AUHF の高調波緩和性能を維持しながら、これらの要件を満たすように開発されました。.[1]
4.2 このアプリケーションの主要なフィルター選択基準
- 広範囲の高調波低減 — 完全に減衰させる必要があります, すべての動作点にわたるサイリスタ DC ドライブの可変高調波スペクトル, 設計点のスペクトルだけではない
- 転流ノッチの軽減 — フィルタのインダクタンスは、転流オーバーラップ中の電流変化率を制限することにより、ノッチの深刻さを緩和します。
- ABS コンデンサバンクの安全切断 — 新しい ABS 規格に準拠, 高調波フィルタの動作を維持中にコンデンサ障害が発生した場合、フィルタはコンデンサバンクを自動的に切断する必要があります。. MOSリネーターにはこれを標準搭載
- 冗長安全監視 — 冗長アラートによる初期段階の保護モニタリング, 安全性が重要なDP船に適しています
- コンパクトな後付け封筒 — コンパクトなフィルターアセンブリにより、改装時の船体と甲板の貫通が最小限に抑えられました。
4.3 導入戦略 — ハリケーンシーズン中の段階的な導入
海上試験試験とフィルターの配備は、メキシコ湾のハリケーンシーズン中に行われました。. これにより異常な制約が課されました: 嵐により位置変更が必要になった場合に備えて、船舶は常に推進能力を維持しなければなりませんでした。. したがって、フィルターは一度に 1 セットずつ接続されました - 取り付け, テスト, ABS コンプライアンスと動作上の互換性を検証する, それから次のセットに進みます. それぞれの段階が確認されて初めてチームは前進した.[1]
MOS Lineator Type Tを4台のライン側にそれぞれ設置 3,000 HP 推進 DC ドライブと 1,500 HP 格納式バウ スラスター DC ドライブ — 合計 5 つのフィルター. 既存の擬似移相トランスとインダクタ装置を撤去.
05 結果: あらゆる動作条件下での ABS 準拠
5.1 電圧歪み — 適合する最悪のケース
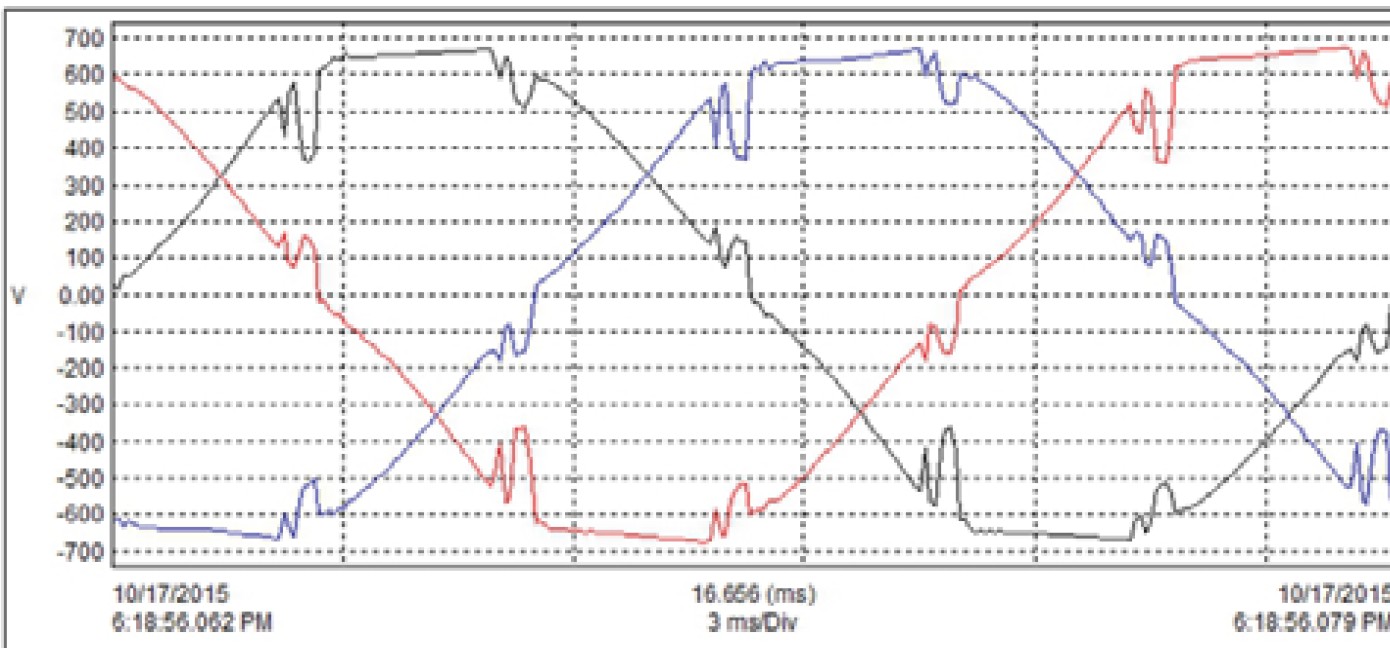
イチジク. 2. 480MOSリネーター設置後のDynamic Positioning動作ワーストケースのVバス電圧波形. THDv = 7.8% — ABS 内 8% 限界. と比較してください 20.89% 図のプレフィルター条件. 1. ソース: ミラス・インターナショナル.[1]
480V バスの THDv は 20.89% (最悪の場合のプレフィルター, 2つの発電機, 100% スピード, バスタイが開いた状態) へ 7.8% 同等のワーストケースのダイナミック ポジショニング シナリオ ポストフィルター - ABS より下 8% 限界. テストされたすべての動作条件にわたって, THDvは引き続き下回った 8%.[1]
5.2 バウスラスターのテストデータ — 可変負荷プロファイル
ザ 1,500 HP 格納式バウ スラスターは、4 台すべての発電機をオンラインにして全速度範囲にわたってテストされました。. 結果は、幅広い負荷範囲にわたるフィルタの有効性を示しています。:[1]
| 速度基準 | 発電機 | バスタイ | THDv | THDi | 電圧 |
|---|---|---|---|---|---|
| 25% | 4 | 閉店 | 0.54 - 0.62% | 26 - 30.7% | 603 で |
| 50% | 4 | 閉店 | 0.7 - 0.9% | 13.83 - 13.93% | 602 で |
| 75% | 4 | 閉店 | 1.23 - 1.3% | 7.4 - 7.52% | 600 で |
| 100% | 4 | 閉店 | 0.9 - 0.97% | 5.6 - 5.65% | 599 で |
THDi の上昇に注目してください。 25% スピード (26–30.7%). これは、点弧角が小さい場合のサイリスタ DC ドライブの特徴です。軽負荷では電流波形がさらに歪みます。. これにもかかわらず, 電圧歪みは以下のままです 1% この動作点では高調波電流の絶対値が小さいため、 25% ロード. これは重要な違いを示しています: THDi と THDv は互換性のある指標ではありません。軽負荷時の THDi が高いことは、必ずしも THDv が高いことを意味するわけではありません。.
5.3 最悪の場合の動的測位テスト結果
| 動作状態 | 発電機 | THDv | 電圧 | 注釈 |
|---|---|---|---|---|
| 自動 DP — すべてのスラスター | すべて | 2.63 - 2.84% | 479 で | 可変荷重 |
| 静的対向 DP — すべてのスラスター 100% | すべて | 7.76 - 7.85% | 471 で | 最大調和応力 |
| 全速前進 - 左舷および右舷 100% | すべて | 6.50 - 6.62% | 473 - 478 で | DDTやTTは無し |
最悪のケース - すべてのスラスターが停止している静的な対向 DP 100% — 7.76 ~ 7.85% の THDv を生成. これは、この船舶で考えられる最も厳しい高調波荷重シナリオです。: 全負荷時にすべてのドライブを同時に実行, お互いに押し合って風や流れに抗して位置を保つ. この状態でも, システムは ABS 内に留まりました 8% 限界.[1]
06 電力品質の観点: このケーススタディが示すもの
6.1 整流ノッチング — 過小評価されている高調波問題
産業用高調波に関する議論のほとんどは、定常状態で電力アナライザによって測定される電流 THDi と電圧 THDv に焦点を当てています。. 整流ノッチは、外乱の別のカテゴリです。これは、予測可能な速度で発生する時間領域の過渡現象です。 (6 パルス サイリスタ ブリッジの場合は 1 サイクルあたり 6 回) ただし、定常状態のTHD測定では完全には捕捉できない特性があります. ノッチの深さ, 幅, と面積は、機器の互換性を評価するための関連パラメータです。, これらは、単なるドライブのサイズではなく、ソースのインピーダンスとドライブの点火角度の関数です。.[2]
IEEE 519 テーブルにノッチのあるアドレス 10.3 ノッチ深さとノッチ面積の制限. ABS には海洋用途にも同様の規定があります. どちらの場合も, この制限が存在するのは、制御電子機器がノッチによって引き起こされるタイミングエラー、まさにこの船舶で観察された故障モードに対して脆弱であるためです。.
6.2 THDi vs. THDv — 軽負荷時の異常
バウスラスターのテストデータは強調する価値のある点を示しています: に 25% スピード, THDi は 26 ~ 30% でしたが、THDv は以下でした 1%. に 100% スピード, THDi は 5.6 ~ 5.65% に低下し、THDv は 0.9 ~ 0.97% でした。. どちらの指標も負荷とともに改善されました, しかしTHDiははるかに高いスタートを切った. これは矛盾ではなく、THD が基本波のパーセンテージとしてどのように定義されるかという結果です。.
軽負荷時, 基本電流が小さい. 高調波電流, 絶対的には小さいながらも, 小さなファンダメンタルズの大部分が占めるため、高い THDi が生成されます. 同じ小さな絶対高調波電流がソース インピーダンスを流れ、小さな絶対電圧歪みを生成するため、THDv が低くなります。. 実践的なレッスン: ネットワークに対する高調波の影響を評価するには、THDv と絶対高調波電流の大きさを調べる必要があります, THDiだけではない.
6.3 設置前のシミュレーション - 正しい手順
このケーススタディ, プレインズ・オールアメリカン・パイプライン事件のような, フィルターを購入する前に高調波シミュレーションの価値を実証します. SOLV™ モデルが予測した 5.8% ポート側回線の THDv ポストフィルタ; 現場で測定した結果は 7.8% 最悪の場合の全船 DP シナリオ - 左舷のみのシミュレーションには存在しない追加のスラスタ負荷を考慮すると、合理的な一致. シミュレーションにより、正しいフィルターのタイプとサイズを指定するのに十分な信頼性が得られました。, 作業船上で費用のかかる試行錯誤のアプローチを回避する.
6.4 IPQDFシリーズとの接続
このシリーズの前の 2 つのケーススタディ (ESP正弦波フィルター, プレーンズ・オールアメリカン・パイプライン) 6パルスPWMドライブとサイリスタDCドライブをそれぞれ扱いました, どちらも陸上の島嶼システム内で. このケーススタディは、その状況を海洋用途に拡張し、持続的な高調波加熱とは異なる故障メカニズムとして転流ノッチを紹介します。. 一緒に, これら 3 つのケーススタディは、発電機から電力を供給される産業および海洋設備で遭遇する高調波問題の主要なカテゴリーをカバーしています。.
このシリーズの技術記事 (第1条~第3条) 同じ高調波現象を理論的側面から扱う - 現在のスペクトル, ネットワークインタラクション, モーター効果. ケーススタディは、これらの現象が実際のシステムで軽減されないまま放置されると何が起こるかを示しています. 理論と結果の間のギャップは、通常、機器の故障と収益の損失によって測定されます。.
参照
- [1] 株式会社ミラスインターナショナル, “MOS リネーターの導入事例: 海上勤務の高調波緩和によりオフショア業務用船舶プログラムを節約,” 適用事例, ブランプトン, オンタリオ, カナダ, 2016. 利用可能: mirusinternational.com/moslineator
- [2] IEEE規格 519-2022, “電力システムにおける高調波制御に関する IEEE 規格,” IEEE, ニューヨーク, NY, 2022. (電圧ノッチに関するセクション, テーブル 10.3.)
- [3] アメリカ海運局 (ABS), “電力システムにおける高調波の制御に関するガイダンスノート,” ABS, ヒューストン, テキサス州.