
해양 의무 고조파 완화로 해양 서비스 선박 프로그램 절약 — Mirus International
| 애플리케이션 | 해양 공급 및 서비스 선박 - DC 전기 추진 장치 |
| 드라이브 | 4개 3,000 HP DC 추진 드라이브 + 하나 1,500 HP 개폐식 활 스러스터 DC 드라이브 |
| 분포 | 600 에 / 480 V 선박 전원 시스템, 다중 발전기 |
| 작동 모드 | 동적 포지셔닝 (DP) — 안전이 중요함, 불안정성에 대한 무관용 |
| 사전 필터 THDv | 최대 20.89% — 모든 표준을 초과했습니다, 장비 고장을 일으켰다 |
| 고조파 필터 | Mirus MOS 선형기 유형 T (해양 및 해양 관련) |
| 사후 필터 THDv | < 8% 모든 작동 조건에서 — ABS 준수 |
| 인증기관 | 미국해운국 (ABS) |
01 운영 상황: 출근할 수 없는 선박
해양 석유 및 가스 산업의 업무 범위 확대를 위해 DC 전기 추진 장치를 갖춘 해양 공급 및 서비스 선박을 구입하고 업그레이드했습니다.. 업그레이드에는 향상된 내비게이션 시스템이 포함되었습니다., 증가된 용량의 원격 조종 차량 (ROV) 장비, 업그레이드된 크레인 및 리프트 시스템. 의도는 뻔했다: 더 유능한 선박, 더 많은 수익 창출 계약.[1]
결과는 반대였음. 새로운 장비는 원래 시스템보다 전압 왜곡에 훨씬 더 민감한 것으로 입증되었습니다.. 해상 시험 중, 전압 고조파 왜곡 수준 초과 20% 동적 포지셔닝으로 작동하는 동안 (DP) 모드 - 해양 작업자가 드릴 장비 및 생산 플랫폼 근처에서 작업하는 데 필요한 정밀 스테이션 유지 기능. 연쇄적인 실패: 네비게이션 시스템, 크레인 제어, 및 ROV 장비는 모두 작동 문제와 구성 요소 오류를 경험했습니다.. 선박은 해상 시험을 통과하지 못했고 해양 계약을 수락할 수 없었습니다..[1]
이 선박은 현재의 미국 해운국(American Bureau of Shipping)보다 이전에 만들어졌습니다. (ABS) 고조파 지침은 이전 표준에 따라 승인되었습니다.. 업그레이드가 지정된 경우, 고조파 준수는 설계 요구 사항이 아니었습니다.. 해상 시험 중 고장이 발생한 후에야 선박을 운항하기 위한 전제 조건으로 고조파 완화가 검토되었습니다..[1]
02 기존 완화가 실패한 이유
선박에는 고조파 완화 기능이 없었습니다. 즉, 임피던스 정합 인덕터와 병렬로 작동하는 위상 변환 변압기로 구성된 기존 방식을 사용하고 있었습니다.. 이것은 의사 다중 펄스 배열입니다.: 개별 드라이브 그룹으로 공급을 위상 이동하여, 그 의도는 서로 다른 그룹의 고조파 전류가 공통 공급 버스에서 상쇄되도록 하는 것입니다..
이 계획은 전압 왜곡을 허용 가능한 수준으로 줄이는 데 실패했습니다., 그리고 돌이켜보면 이건 예측 가능한 일이었어. 위상 변이 의사 다중 펄스 전략은 취소 지점에서 크기가 동일하고 위상이 반대인 개별 드라이브 그룹의 고조파 전류에 의존합니다.. 이는 일관된 고조파 특성을 갖는 PWM 유형 ASD에 합리적으로 잘 작동합니다.. 사이리스터 기반 DC 드라이브에서는 작동하지 않습니다..[1]
서로 다른 부하에서 동시에 작동하는 5개 DC 드라이브의 가변 고조파 성분 조합, 플러스 정류 노칭, 생산했다 20%+ 해상 시험 중 측정된 THDv. 기존 완화 조치는 단순히 규모가 작은 것이 아니라 해당 애플리케이션에 맞지 않는 기술이었습니다..
03 DC 드라이브 및 정류 노칭: 실패의 메커니즘
3.1 사이리스터 정류가 전압 노치를 생성하는 방법
사이리스터 DC 드라이브는 AC 공급 전압을 정류하여 제어된 DC 버스를 생성합니다.. 각 정류 이벤트에서(전도가 하나의 사이리스터에서 다음 사이리스터로 전환될 때) AC 전원의 두 위상이 전도성 사이리스터를 통해 효과적으로 단락되는 짧은 기간이 있습니다.. 정류 중첩 각도 동안 구동 입력의 공급 전압이 거의 0으로 붕괴됩니다.. 이것은 전압 노치입니다..[2]
전압 노치는 공급 네트워크로 다시 전파되어 동일한 버스의 모든 공통 커플링 지점에 나타납니다.. 심각도는 소스 임피던스에 따라 달라집니다. 즉, 임피던스가 높을수록, 노치가 더 깊고 넓을수록. 상대적으로 높은 소스 임피던스를 갖는 선박 전력 시스템에서 (유틸리티 그리드가 아닌 발전기), 노치는 심각하며 연결된 모든 장비에 동시에 영향을 미칩니다..
3.2 노치가 장비 고장을 일으키는 이유
전압 노치는 고주파수입니다., 고진폭 방해. 디지털 제어 시스템 - 내비게이션 컴퓨터, 크레인 PLC 컨트롤러, ROV 드라이브 전자 장치 - 동기화 및 타이밍을 위한 공급 전압 샘플링. 잘못된 순간의 전압 노치는 제로 크로싱으로 해석될 수 있습니다., 타이밍 오류를 일으키는, 거짓 트리거, 또는 명백한 결함 여행. 이는 이 선박의 크레인 제어 및 ROV 장비를 비활성화하는 실패 모드입니다.: 지속적인 고조파로 인한 열 손상이 아님, 그러나 일시적인 노칭으로 인한 시스템 중단을 제어합니다..[1]
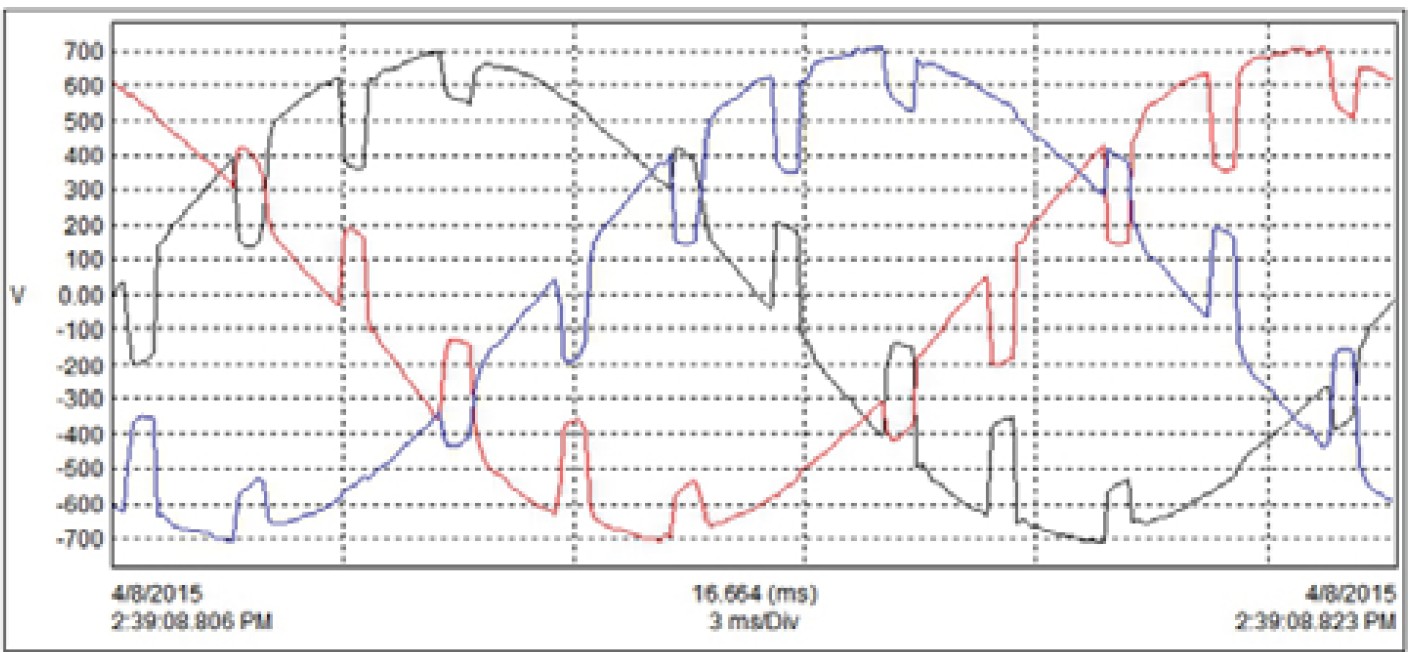
무화과. 1. 480최악의 조건에서의 V 버스 전압 파형 - 생성기 2개, 100% 추진 속도, 버스타이 오픈. THDv = 20.89%. 심각한 파형 왜곡 및 정류 노칭이 명확하게 표시됩니다.. 출처: 미루스 인터내셔널.[1]
3.3 시뮬레이션 사진 — SOLV™ 분석
완화 전략을 시작하기 전에, Mirus와 NSOEM은 전체 시스템 전반의 선박 검토를 수행하고 Mirus를 사용했습니다.’ 독점 SOLV™ 전체 선박 전기 시스템을 모델링하는 고조파 시뮬레이션 소프트웨어 - 발전기, 배전 변압기, 다양한 작동 지점의 DC 드라이브, 제안된 필터 구성. 시뮬레이션 작업 흐름에는 두 단계가 있었습니다.:[1]
- 사전 필터 기준 — 원래 장비를 사용하여 배전반에서 THDv를 시뮬레이션했습니다.: 13% 항구쪽에 혼자, 현장 측정과 일치
- 필터 후 예측 — 각 DC 드라이브의 MOS Lineator를 사용하여 시뮬레이션된 THDv: 5.8% — ABS 내에서 8% 한계
초기 시뮬레이션과 현장 측정된 사전 필터 조건 간의 긴밀한 일치로 소프트웨어 모델이 검증되었습니다.. 이를 통해 하드웨어를 주문하거나 설치하기 전에 사후 필터 시뮬레이션 결과를 신뢰할 수 있다는 확신을 갖게 되었습니다..
04 용액: MOS Lineator - 해상용 필터 설계
4.1 해양 전용 필터가 필요한 이유
표준 산업용 고조파 필터는 해양 응용 분야에 적합하지 않습니다.. 환경 - 진동, 소금 공기, 습기, 온도 순환 - 다른 구성이 필요함. 해양 분류 기관 (ABS, DNV, 로이드 등록부) 선박에 설치된 전기 장비에 대한 특정 요구 사항을 부과합니다., 고조파 필터 포함.[3] 미루스 MOS (해양 및 해양 관련) Lineator는 표준 Lineator AUHF의 고조파 완화 성능을 유지하면서 이러한 요구 사항을 충족하도록 개발되었습니다..[1]
4.2 이 애플리케이션의 주요 필터 선택 기준
- 넓은 스펙트럼 고조파 감소 — 전체를 감쇠해야 합니다., 모든 작동 지점에서 사이리스터 DC 드라이브의 가변 고조파 스펙트럼, 디자인 포인트 스펙트럼뿐만 아니라
- 정류 노치 완화 - 필터 인덕턴스는 정류 중첩 중 전류 변화율을 제한하여 노치 심각도를 줄입니다.
- ABS 커패시터 뱅크 안전 분리 — 새로운 ABS 표준에 따라, 고조파 필터 작동을 유지하는 동안 커패시터 결함이 발생하는 경우 필터는 자동으로 커패시터 뱅크를 분리해야 합니다.. MOS Lineator는 이를 표준 기능으로 통합합니다.
- 중복 안전 모니터링 — 중복 경고를 통한 초기 단계 보호 모니터링, 안전이 중요한 DP 선박에 적합
- 소형 개조 봉투 — 소형 필터 어셈블리로 개조를 위한 선체 및 데크 관통이 최소화되었습니다.
4.3 배포 전략 — 허리케인 시즌 동안 단계적 설치
멕시코만 허리케인 시즌 동안 해상 시험 테스트 및 필터 배치가 이루어졌습니다.. 이는 비정상적인 제약을 부과했습니다.: 폭풍으로 인해 위치를 변경해야 하는 경우를 대비하여 선박은 항상 추진 능력을 유지해야 했습니다.. 따라서 필터는 한 번에 한 세트씩 연결되었습니다. — 설치, 테스트, ABS 준수 및 운영 호환성 확인, 그런 다음 다음 세트로 넘어가세요. 각 단계가 확정된 후에야 팀은 전진했습니다..[1]
MOS Lineator Type T 장치는 4개의 각 라인 측에 설치되었습니다. 3,000 HP 추진 DC 드라이브 및 1,500 HP 접이식 활 스러스터 DC 드라이브 - 총 5개의 필터. 기존 의사위상변압기 및 인덕터 장비를 철거하였습니다..
05 검색 결과: 모든 작동 조건에서 ABS 준수
5.1 전압 왜곡 - 규정 준수에 대한 최악의 경우
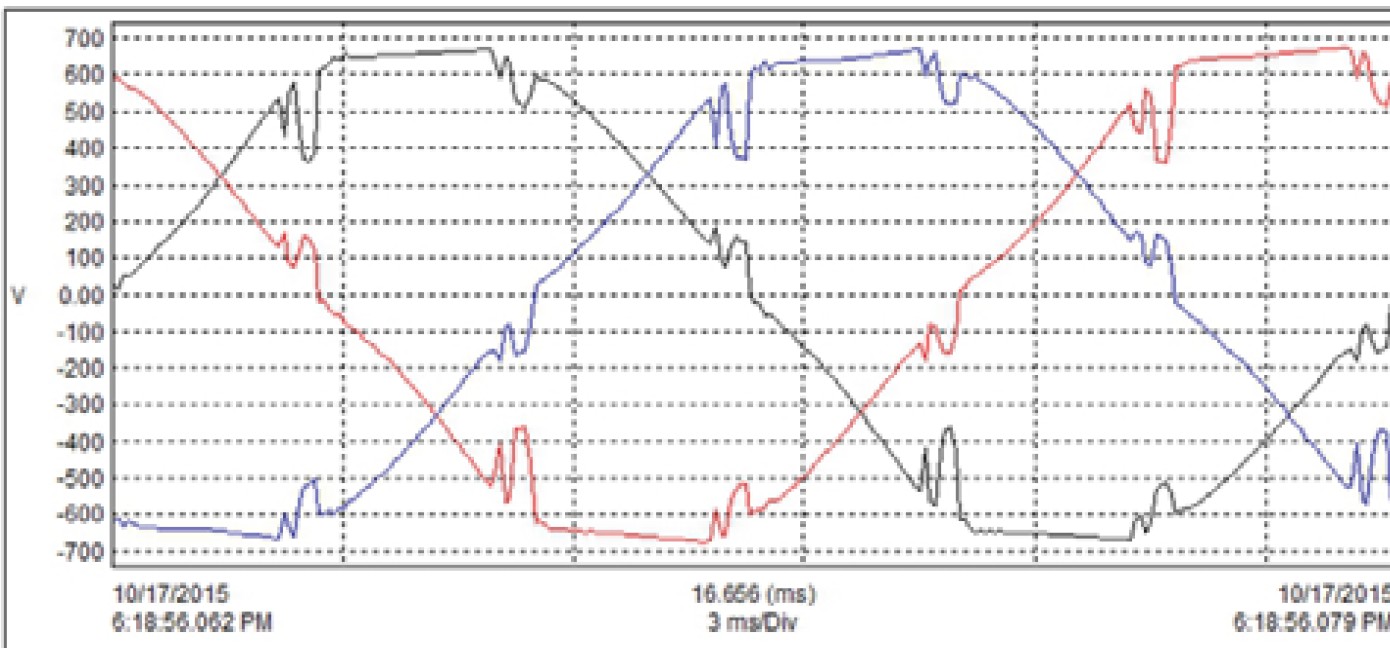
무화과. 2. 480MOS Lineator 설치 후 최악의 경우 Dynamic Positioning 작동 시 V 버스 전압 파형. THDv = 7.8% — ABS 내 8% 한계. 비교 20.89% 그림의 사전 필터 조건. 1. 출처: 미루스 인터내셔널.[1]
480V 버스 THDv가 다음에서 떨어졌습니다. 20.89% (최악의 경우 사전 필터, 발전기 2개, 100% 속도, 버스타이 오픈) 에 7.8% 동등한 최악의 경우 동적 포지셔닝 시나리오 사후 필터 - ABS 아래 8% 한계. 테스트된 모든 작동 조건에서, THDv는 아래에 유지되었습니다. 8%.[1]
5.2 활 추진기 테스트 데이터 - 가변 하중 프로필
The 1,500 HP 접이식 활 추진기는 4개의 발전기를 모두 온라인으로 사용하여 전체 속도 범위에서 테스트되었습니다.. 결과는 넓은 부하 범위에서 필터의 효율성을 보여줍니다.:[1]
| 속도 참조 | 발전기 | 버스 타이 | THDv | THDi | 전압 |
|---|---|---|---|---|---|
| 25% | 4 | 닫은 | 0.54 - 0.62% | 26 - 30.7% | 603 에 |
| 50% | 4 | 닫은 | 0.7 - 0.9% | 13.83 - 13.93% | 602 에 |
| 75% | 4 | 닫은 | 1.23 - 1.3% | 7.4 - 7.52% | 600 에 |
| 100% | 4 | 닫은 | 0.9 - 0.97% | 5.6 - 5.65% | 599 에 |
THDi가 높아졌다는 점에 주목하세요. 25% 속도 (26-30.7%). 이는 낮은 점화 각도에서 사이리스터 DC 드라이브의 특징입니다. 전류 파형은 경부하에서 더 왜곡됩니다.. 그럼에도 불구하고, 전압 왜곡은 아래에 남아 있습니다. 1% 이 동작점에서는 고조파 전류의 절대 크기가 낮기 때문에 25% 하중. 이는 중요한 차이점을 보여줍니다.: THDi와 THDv는 상호 교환 가능한 측정항목이 아닙니다. 경부하에서 높은 THDi가 반드시 높은 THDv를 의미하는 것은 아닙니다..
5.3 최악의 경우 동적 포지셔닝 테스트 결과
| 작동 조건 | 발전기 | THDv | 전압 | 참고 |
|---|---|---|---|---|
| 자동 DP — 모든 추진기 | 모든 | 2.63 - 2.84% | 479 에 | 가변 로딩 |
| 정적 반대 DP — 모든 추진기 100% | 모든 | 7.76 - 7.85% | 471 에 | 최대 조화 응력 |
| 전진 속도 - 좌현 및 우현 100% | 모든 | 6.50 - 6.62% | 473 - 478 에 | DDT 또는 TT 없음 |
최악의 경우 — 모든 추진기가 있는 정적인 반대 DP 100% — 7.76~7.85% THDv 생성. 이는 이 선박에서 가능한 가장 심각한 조화 하중 시나리오입니다.: 전체 부하에서 동시에 모든 드라이브, 바람과 조류에 대항하여 위치를 유지하기 위해 서로 밀기. 이런 상황에서도, 시스템은 ABS 내에 남아 있습니다. 8% 한계.[1]
06 전력 품질 관점: 이 사례 연구에서 보여주는 내용
6.1 정류 노칭 — 과소평가된 고조파 문제
대부분의 산업 고조파 논의는 정상 상태에서 전력 분석기로 측정한 전류 THDi 및 전압 THDv에 중점을 둡니다.. 정류 노칭은 외란의 다른 범주로, 예측 가능한 속도로 발생하는 시간 영역 과도 현상입니다. (6펄스 사이리스터 브리지의 경우 사이클당 6회) 그러나 정상 상태 THD 측정이 완전히 포착하지 못하는 특성이 있습니다.. 노치 깊이, 너비, 및 면적은 장비 호환성을 평가하기 위한 관련 매개변수입니다., 이는 단지 드라이브 크기뿐만 아니라 소스 임피던스와 드라이브 발사 각도의 함수입니다..[2]
IEEE 519 테이블의 노칭 문제 해결 10.3 노치 깊이 및 노치 면적 제한. ABS에는 해양 응용 분야에 대한 유사한 규정이 있습니다.. 두 경우 모두에, 특히 제어 전자 장치가 노치로 인한 타이밍 오류에 취약하기 때문에 한계가 존재합니다. 정확히 이 선박에서 관찰된 고장 모드입니다..
6.2 THDi 대. THDv - 경부하 이상
선수 스러스터 테스트 데이터는 강조할 가치가 있는 점을 제시합니다.: 에 25% 속도, THDi는 26~30%였고 THDv는 이보다 낮았습니다. 1%. 에 100% 속도, THDi는 5.6~5.65%로 떨어진 반면 THDv는 0.9~0.97%였습니다.. 두 측정항목 모두 로드에 따라 개선되었습니다., 하지만 THDi는 훨씬 더 높게 시작했어요. 이것은 역설이 아닙니다. 이는 THD가 기본 비율로 정의되는 방식의 결과입니다..
경부하 시, 기본 전류가 작다. 고조파 전류, 절대적으로 작은 반면, 작은 기본 요소의 큰 부분 — 높은 THDi 생성. 동일한 작은 절대 고조파 전류가 소스 임피던스를 통해 흐르고 작은 절대 전압 왜곡을 생성하므로 THDv가 낮습니다.. 실용적인 교훈: 네트워크에 대한 고조파 영향을 평가하려면 THDv와 절대 고조파 전류 크기를 살펴봐야 합니다., THDi 혼자가 아니다.
6.3 설치 전 시뮬레이션 — 올바른 순서
이 사례 연구, Plains All-American 파이프라인 케이스처럼, 필터 조달 전 고조파 시뮬레이션의 가치를 보여줍니다.. 솔브™ 모델이 예측됨 5.8% 포트 측 회로의 THDv 포스트 필터; 현장 측정 결과는 7.8% 최악의 전체 선박 DP 시나리오에서 — 좌현측 전용 시뮬레이션에는 존재하지 않는 추가 스러스터 부하를 고려하면 합리적인 합의입니다.. 시뮬레이션을 통해 올바른 필터 유형과 크기를 지정할 수 있을 만큼 충분한 신뢰도를 얻었습니다., 작업 선박에 대한 값비싼 시행착오 접근 방식 방지.
6.4 IPQDF 시리즈에 연결
이 시리즈의 이전 두 가지 사례 연구 (ESP 사인파 필터, Plains All-American 파이프라인) 6펄스 PWM 드라이브와 사이리스터 DC 드라이브를 각각 다루었습니다., 육지 기반 섬 시스템 모두에서. 이 사례 연구는 그림을 해양 응용 분야로 확장하고 지속적인 고조파 가열과 구별되는 고장 메커니즘으로 정류 노칭을 도입합니다.. 함께, 이 세 가지 사례 연구는 발전기 공급 산업 및 해양 설비에서 발생하는 고조파 문제의 주요 범주를 다룹니다..
이 시리즈의 기술 문서 (제1~3조) 이론적 측면(현재 스펙트럼)에서 동일한 고조파 현상을 해결합니다., 네트워크 상호작용, 운동 효과. 사례 연구는 이러한 현상이 실제 시스템에서 완화되지 않은 채 방치되면 어떤 일이 발생하는지 보여줍니다.. 이론과 결과 사이의 격차는 일반적으로 장비 고장과 수익 손실로 측정됩니다..
참조
- [1] 미루스인터내셔널(주), “MOS Lineator 사례 연구: 해양 임무 고조파 완화로 해양 서비스 선박 프로그램 절약,” 응용 사례 연구, 브램톤, 온타리오, 캐나다, 2016. 사용 가능: mirusinternational.com/moslineator
- [2] IEEE 표준 519-2022, “전력 시스템의 고조파 제어에 대한 IEEE 표준,” IEEE, 뉴욕, NY, 2022. (전압 노칭 섹션, 표 10.3.)
- [3] 미국해운국 (ABS), “전력 시스템의 고조파 제어에 대한 지침 노트,” ABS, 휴스턴, 텍사스 걸프 연안에, 텍사스.