
L'atténuation des harmoniques en service maritime sauve un programme de navires de service offshore — Mirus International
| Application | Navire de ravitaillement et de service offshore — Propulsion électrique DC |
| Disques | Quatre 3,000 Entraînements de propulsion HP DC + un 1,500 Propulseur d'étrave rétractable HP Entraînement CC |
| Distribution | 600 En / 480 Système d'alimentation du navire V, plusieurs générateurs |
| Mode de fonctionnement | Positionnement dynamique (DP) — critique pour la sécurité, tolérance zéro pour l'instabilité |
| Pré-filtre THDv | Jusqu'à 20.89% — a dépassé toutes les normes, causé des pannes d'équipement |
| Filtre harmonique | Linéateur Mirus MOS Type T (Spécifique à la marine et à l'offshore) |
| Post-filtre THDv | < 8% dans toutes les conditions de fonctionnement — conforme à l'ABS |
| Organisme de certification | Bureau américain de la navigation (ABS) |
01 Contexte opérationnel: Un navire qui ne pouvait pas aller au travail
Un navire de ravitaillement et de service offshore équipé d'une propulsion électrique à courant continu a été acheté et modernisé pour élargir son champ d'action pour l'industrie pétrolière et gazière offshore.. Les mises à niveau comprenaient des systèmes de navigation améliorés, Véhicule télécommandé de capacité accrue (ROV) équipement, et des systèmes de grue et de levage améliorés. L'intention était simple: navire plus performant, plus de contrats générateurs de revenus.[1]
Le résultat a été le contraire. Le nouvel équipement s'est avéré beaucoup plus sensible à la distorsion de tension que les systèmes d'origine. Lors des essais en mer, niveaux de distorsion harmonique de tension dépassés 20% lors d'un fonctionnement en positionnement dynamique (DP) mode — la capacité de maintien de position précise dont les opérateurs offshore ont besoin pour travailler à proximité des plates-formes de forage et des plates-formes de production. Des échecs en cascade: systèmes de navigation, commandes de grue, et les équipements ROV ont tous connu des problèmes opérationnels et des pannes de composants. Le navire n'a pas réussi les essais en mer et n'a pas pu accepter de contrats offshore..[1]
Le navire est antérieur à l'actuel American Bureau of Shipping (ABS) directives harmoniques et bénéficiait de droits acquis en vertu de l'ancienne norme. Quand la mise à niveau a été spécifiée, la conformité harmonique n'était pas une exigence de conception. Ce n'est qu'après les échecs lors des essais en mer que l'atténuation des harmoniques a été examinée comme une condition préalable à la mise en service du navire..[1]
02 Pourquoi les mesures d'atténuation existantes ont échoué
Le navire n'était pas dépourvu d'atténuation des harmoniques : il disposait d'un système existant composé de transformateurs déphaseurs fonctionnant en parallèle avec des inducteurs à impédance adaptée.. Il s'agit d'un arrangement pseudo-multi-impulsions: en déphasant l'alimentation vers des groupes d'entraînement individuels, le but est de provoquer l'annulation des courants harmoniques de différents groupes dans le bus d'alimentation commun.
Le système n'a pas réussi à réduire la distorsion de tension à des niveaux acceptables, et rétrospectivement, c'était prévisible. Les stratégies de pseudo-impulsions multiples déphasées reposent sur le fait que les courants harmoniques des groupes de variateurs individuels sont égaux en amplitude et opposés en phase au point d'annulation.. Cela fonctionne raisonnablement bien pour les ASD de type PWM avec des signatures harmoniques cohérentes. Cela ne fonctionne pas pour les variateurs CC à thyristors.[1]
La combinaison du contenu harmonique variable sur les cinq variateurs CC fonctionnant simultanément à différentes charges, plus encoche de commutation, produit le 20%+ THDv mesuré lors des essais en mer. L’atténuation existante n’était pas simplement sous-dimensionnée : elle n’était pas la bonne technologie pour l’application..
03 Variateurs CC et encoche de commutation: Le mécanisme derrière les échecs
3.1 Comment la commutation des thyristors crée des encoches de tension
Un variateur CC à thyristors redresse la tension d'alimentation CA pour produire un bus CC contrôlé. À chaque événement de commutation - lorsque la conduction passe d'un thyristor au suivant - il y a une brève période pendant laquelle deux phases de l'alimentation CA sont effectivement court-circuitées à travers les thyristors conducteurs.. La tension d'alimentation à l'entrée du variateur s'effondre jusqu'à près de zéro pendant la durée de l'angle de chevauchement de commutation.. C'est une encoche de tension.[2]
Les coupures de tension se propagent dans le réseau d'alimentation et apparaissent à chaque point de couplage commun sur le même bus. Leur gravité dépend de l'impédance de la source : plus l'impédance est élevée., plus l'encoche est profonde et large. Sur un système électrique de navire avec une impédance de source relativement élevée (des générateurs plutôt qu’un réseau électrique public), les entailles sont sévères et affectent simultanément tous les équipements connectés.
3.2 Pourquoi les encoches provoquent des pannes d'équipement
Les encoches de tension sont à haute fréquence, perturbations de forte amplitude. Systèmes de contrôle numérique — ordinateurs de navigation, contrôleurs PLC de grue, Electronique d'entraînement du ROV : échantillonnez la tension d'alimentation pour la synchronisation et le timing. Une coupure de tension au mauvais moment peut être interprétée comme un passage à zéro, provoquant des erreurs de timing, faux déclencheurs, ou des déclenchements en cas de panne pure et simple. Il s'agit du mode de défaillance qui désactivait les commandes de la grue et l'équipement ROV sur ce navire.: pas de dommages thermiques dus à des harmoniques soutenues, mais perturbation du système de contrôle due à une encoche transitoire.[1]
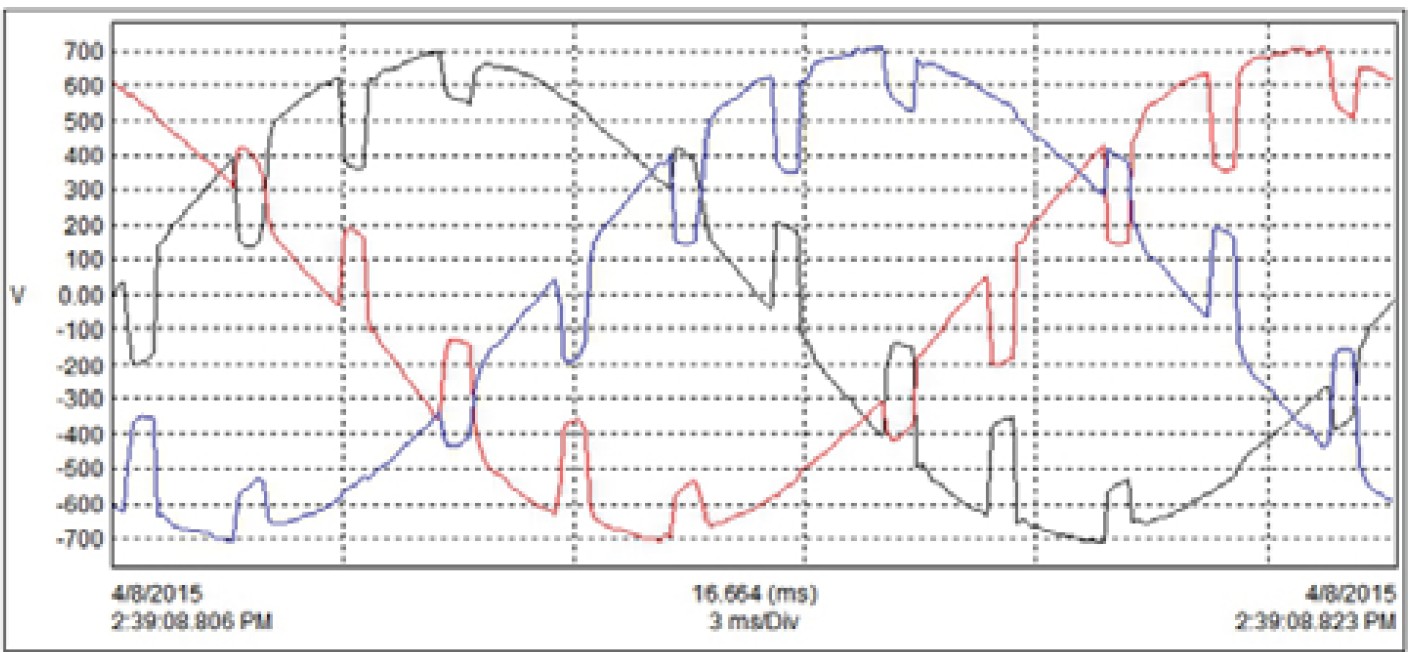
Figue. 1. 480Forme d'onde de tension du bus V dans les pires conditions : deux générateurs, 100% vitesse de propulsion, cravate de bus ouverte. THDv = 20.89%. La distorsion sévère de la forme d'onde et les encoches de commutation sont clairement visibles. Source: Mirus International.[1]
3.3 L’image de la simulation — SOLV™ analyse
Avant de s’engager dans une stratégie d’atténuation, Mirus et NSOEM ont effectué un examen complet des navires à l'échelle du système et ont utilisé Mirus’ SOLV propriétaire™ logiciel de simulation harmonique pour modéliser le système électrique complet du navire – générateurs, transformateurs de distribution, Entraînements DC à différents points de fonctionnement, et la configuration de filtre proposée. Le flux de travail de simulation comportait deux étapes:[1]
- Ligne de base du pré-filtre — THDv simulé au niveau du panneau de distribution avec équipement d'origine: 13% à bâbord seul, conforme aux mesures de terrain
- Prédiction post-filtre — THDv simulé avec linéateurs MOS sur chaque variateur CC: 5.8% — bien dans l'ABS 8% limite
L'accord étroit entre la simulation initiale et les conditions de pré-filtrage mesurées sur le terrain a validé le modèle logiciel. Cela a donné l'assurance que le résultat de la simulation post-filtre était fiable avant qu'un matériel ne soit commandé ou installé..
04 Solution: Linéateur MOS — Conception de filtre pour le service marin
4.1 Pourquoi un filtre spécifique marine
Les filtres anti-harmoniques industriels standards ne conviennent pas aux applications marines. L'environnement — vibrations, air salin, humidité, cyclage de la température – exige une construction différente. Organismes de classification maritime (ABS, DNV, Registre du Lloyd's) imposer des exigences spécifiques aux équipements électriques installés à bord des navires, y compris les filtres harmoniques.[3] Le MirusMOS (Spécifique à la marine et à l'offshore) Lineator a été développé pour répondre à ces exigences tout en conservant les performances d'atténuation des harmoniques du Lineator AUHF standard..[1]
4.2 Critères clés de sélection des filtres pour cette application
- Réduction des harmoniques à large spectre — doit atténuer le plein, spectre harmonique variable des variateurs CC à thyristors sur tous les points de fonctionnement, pas seulement le spectre des points de conception
- Atténuation des encoches de trajet — l'inductance du filtre atténue la gravité des coupures en limitant le taux de changement de courant pendant le chevauchement de commutation
- Déconnexion de sécurité de la batterie de condensateurs ABS — selon les nouvelles normes ABS, le filtre doit automatiquement déconnecter la batterie de condensateurs si un défaut de condensateur se produit tout en maintenant le fonctionnement du filtre d'harmoniques. Le MOS Lineator l'intègre en tant que fonctionnalité standard
- Surveillance de sécurité redondante — surveillance de protection précoce avec alertes redondantes, approprié pour un navire DP critique pour la sécurité
- Enveloppe de rénovation compacte — les pénétrations dans la coque et le pont pour la modernisation ont été minimisées grâce à l'ensemble de filtre compact
4.3 Stratégie de déploiement : installation par étapes pendant la saison des ouragans
Les essais en mer et le déploiement du filtre ont eu lieu pendant la saison des ouragans dans le golfe du Mexique.. Cela imposait une contrainte inhabituelle: le navire devait conserver sa capacité de propulsion à tout moment au cas où une tempête nécessiterait un repositionnement. Les filtres ont donc été connectés un ensemble à la fois — installez, test, vérifier la conformité ABS et la compatibilité opérationnelle, puis passez à la série suivante. Ce n'est qu'une fois chaque étape confirmée que l'équipe a avancé.[1]
Des unités MOS Lineator Type T ont été installées côté ligne de chacun des quatre 3,000 Les variateurs DC à propulsion HP et les 1,500 Propulseur d'étrave rétractable HP Entraînement CC – cinq filtres au total. Le pseudo-transformateur déphaseur et l'équipement d'inductance existants ont été supprimés.
05 Résultats: Conformité ABS dans toutes les conditions de fonctionnement
5.1 Distorsion de tension – dans le pire des cas à conforme
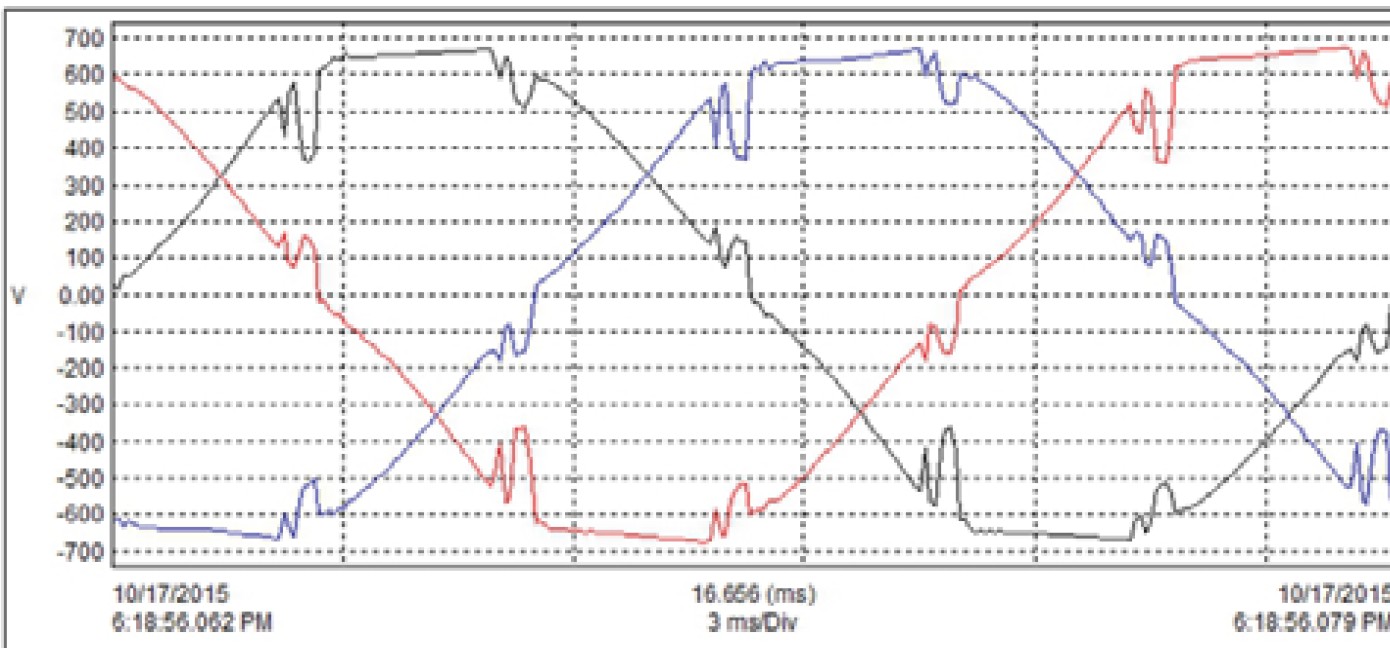
Figue. 2. 480Forme d'onde de tension du bus V dans le pire des cas d'opération de positionnement dynamique après l'installation du linéateur MOS. THDv = 7.8% — au sein de l'ABS 8% limite. Comparez avec le 20.89% état du pré-filtre sur la figure. 1. Source: Mirus International.[1]
Le THDv du bus 480V est passé de 20.89% (pré-filtre dans le pire des cas, deux générateurs, 100% vitesse, cravate de bus ouverte) à 7.8% dans le pire des cas équivalent post-filtre du scénario de positionnement dynamique - en dessous de l'ABS 8% limite. Dans toutes les conditions de fonctionnement testées, Le THDv est resté en dessous 8%.[1]
5.2 Données d'essai du propulseur d'étrave — profil de charge variable
La 1,500 Le propulseur d'étrave rétractable HP a été testé sur toute sa plage de vitesse avec les quatre générateurs en ligne.. Les résultats démontrent l’efficacité du filtre sur une large plage de charges:[1]
| Référence de vitesse | Générateurs | Cravate de bus | THDv | THDi | Tension |
|---|---|---|---|---|---|
| 25% | 4 | Fermé | 0.54 - 0.62% | 26 - 30.7% | 603 En |
| 50% | 4 | Fermé | 0.7 - 0.9% | 13.83 - 13.93% | 602 En |
| 75% | 4 | Fermé | 1.23 - 1.3% | 7.4 - 7.52% | 600 En |
| 100% | 4 | Fermé | 0.9 - 0.97% | 5.6 - 5.65% | 599 En |
Notez le THDi élevé à 25% vitesse (26–30,7%). Ceci est caractéristique des variateurs CC à thyristors à faibles angles d'amorçage : la forme d'onde du courant est plus déformée à faible charge.. Malgré cela, la distorsion de tension reste inférieure 1% à ce point de fonctionnement car l'amplitude absolue des courants harmoniques est faible à 25% charge. Cela illustre une distinction importante: THDi et THDv ne sont pas des mesures interchangeables : un THDi élevé à faible charge n'implique pas nécessairement un THDv élevé..
5.3 Résultats des tests de positionnement dynamique dans le pire des cas
| État de fonctionnement | Générateurs | THDv | Tension | Remarques |
|---|---|---|---|---|
| Auto DP – tous les propulseurs | Tous | 2.63 - 2.84% | 479 En | Chargement variable |
| DP statique opposé – tous les propulseurs 100% | Tous | 7.76 - 7.85% | 471 En | Contrainte harmonique maximale |
| Avance à pleine vitesse – bâbord et tribord 100% | Tous | 6.50 - 6.62% | 473 - 478 En | Pas de DDT ni de TT |
Le pire des cas : DP statique opposé avec tous les propulseurs en position 100% — produit 7,76 à 7,85 % de THDv. Il s'agit du scénario de chargement harmonique le plus grave possible sur ce navire.: tous les entraînements simultanément à pleine charge, se poussant les uns contre les autres pour maintenir leur position contre le vent et le courant. Même dans ces conditions, le système est resté dans l'ABS 8% limite.[1]
06 La perspective de la qualité de l’énergie: Ce qu’illustre cette étude de cas
6.1 Notching de commutation - le problème harmonique sous-estimé
La plupart des discussions sur les harmoniques industrielles se concentrent sur le THDi du courant et le THDv de la tension mesurés par un analyseur de puissance en régime permanent.. Les encoches de commutation constituent une catégorie différente de perturbations : il s'agit d'un transitoire dans le domaine temporel qui se produit à un rythme prévisible. (six fois par cycle pour un pont de thyristors à 6 impulsions) mais avec des caractéristiques que la mesure du THD en régime permanent ne capture pas entièrement. La profondeur d'encoche, largeur, et la superficie sont les paramètres pertinents pour évaluer la compatibilité des équipements, et ce sont des fonctions de l'impédance de la source et de l'angle d'amorçage du variateur - pas seulement de la taille du variateur.[2]
IEEE 519 aborde l'encoche dans sa table 10.3 limites sur la profondeur et la surface de l'entaille. L'ABS a des dispositions analogues pour les applications marines. Dans les deux cas,, les limites existent spécifiquement parce que l'électronique de commande est vulnérable aux erreurs de synchronisation induites par les encoches - exactement le mode de défaillance observé sur ce navire.
6.2 THDi et. THDv — l'anomalie de charge légère
Les données de test du propulseur d’étrave méritent d’être soulignées: à 25% vitesse, Le THDi était de 26 à 30 % tandis que le THDv était inférieur 1%. À 100% vitesse, Le THDi était tombé à 5,6-5,65 % tandis que le THDv était de 0,9 à 0,97 %. Les deux métriques se sont améliorées avec la charge, mais THDi a commencé bien plus haut. Ce n’est pas un paradoxe – c’est une conséquence de la façon dont le THD est défini en pourcentage du fondamental..
À faible charge, le courant fondamental est petit. Les courants harmoniques, bien que petit en termes absolus, sont une grande fraction d'un petit fondamental - produisant un THDi élevé. Les mêmes petits courants harmoniques absolus traversent l'impédance de la source et produisent une petite distorsion de tension absolue, d'où un faible THDv.. La leçon pratique: L'évaluation de l'impact des harmoniques sur le réseau nécessite d'examiner le THDv et les amplitudes absolues du courant harmonique., pas THDi seul.
6.3 Simulation avant installation : la bonne séquence
Cette étude de cas, comme le cas du pipeline Plains All-American, démontre la valeur de la simulation harmonique avant l’achat du filtre. Le SOLV™ modèle prédit 5.8% Post-filtre THDv sur le circuit bâbord; le résultat mesuré sur le terrain était 7.8% dans le pire des cas de DP avec un navire complet – un accord raisonnable compte tenu des charges supplémentaires sur les propulseurs qui ne sont pas présentes dans la simulation à bâbord uniquement. La simulation a donné suffisamment de confiance pour spécifier le type et la taille de filtre corrects, éviter une approche coûteuse d'essais et d'erreurs sur un navire en activité.
6.4 Connexion à la série IPQDF
Les deux études de cas précédentes de cette série (Filtre sinusoïdal ESP, Pipeline All-American des Plaines) traitait respectivement des variateurs PWM à 6 impulsions et des variateurs CC à thyristors, à la fois dans les systèmes insulaires terrestres. Cette étude de cas étend le tableau aux applications marines et introduit le découpage de commutation comme mécanisme de défaillance distinct du chauffage harmonique soutenu.. Ensemble, ces trois études de cas couvrent les grandes catégories de problèmes harmoniques rencontrés dans les installations industrielles et marines alimentées par groupes électrogènes.
Les articles techniques de cette série (Articles 1 à 3) aborder les mêmes phénomènes harmoniques du point de vue théorique - spectres de courant, interaction réseau, effets moteurs. Les études de cas montrent ce qui se passe lorsque ces phénomènes ne sont pas atténués dans des systèmes réels.. L'écart entre la théorie et les conséquences se mesure généralement en termes de panne d'équipement et de perte de revenus..
Références
- [1] Mirus International Inc., “Étude de cas du linéateur MOS: L'atténuation des harmoniques du service maritime sauve le programme des navires de service offshore,” Étude de cas d'application, Brampton, Ontario, Canada, 2016. Disponible: mirusinternational.com/moslineator
- [2] IEEE Std 519-2022, “Norme IEEE pour le contrôle des harmoniques dans les systèmes d'alimentation électrique,” IEEE, New York, NY, 2022. (Section sur l'encoche de tension, Table 10.3.)
- [3] Bureau américain de la navigation (ABS), “Notes d'orientation sur le contrôle des harmoniques dans les systèmes d'alimentation électrique,” ABS, Houston, Émission.