
Marine Duty Harmonic Mitigation Saves an Offshore Service Vessel Program — Mirus International
| طلب | Offshore supply and service vessel — DC electric propulsion |
| محركات الأقراص | أربعة 3,000 HP DC propulsion drives + واحد 1,500 HP retractable bow thruster DC drive |
| التوزيع | 600 في / 480 V vessel power system, مولدات متعددة |
| Operating mode | Dynamic Positioning (DP) — safety-critical, zero tolerance for instability |
| التصفية المسبقة لـ THDv | تصل إلى 20.89% — exceeded all standards, caused equipment failures |
| مرشح توافقي | Mirus MOS Lineator Type T (Marine and Offshore Specific) |
| ما بعد التصفية THDv | < 8% في جميع ظروف التشغيل - متوافق مع نظام ABS |
| هيئة التصديق | المكتب الأمريكي للشحن (ABS) |
01 سياق التشغيل: سفينة لا تستطيع الذهاب إلى العمل
تم شراء وتحديث سفينة إمداد وخدمة بحرية مجهزة بالدفع الكهربائي بالتيار المستمر لتوسيع نطاق عملها في صناعة النفط والغاز البحرية. وشملت الترقيات أنظمة الملاحة المحسنة, مركبة تعمل عن بعد ذات قدرة متزايدة (ROV) معدات, وأنظمة الرفع والرفع المحسنة. وكان القصد واضحا: سفينة أكثر قدرة, المزيد من العقود المدرة للدخل.[1]
وكانت النتيجة عكس ذلك. أثبتت المعدات الجديدة أنها أكثر حساسية لتشويه الجهد من الأنظمة الأصلية. خلال التجارب البحرية, تم تجاوز مستويات التشوه التوافقي للجهد 20% أثناء العمل في تحديد المواقع الديناميكية (DP) الوضع - القدرة الدقيقة على حفظ المحطة التي يحتاجها المشغلون البحريون للعمل بالقرب من منصات الحفر ومنصات الإنتاج. وتوالت الإخفاقات: أنظمة الملاحة, ضوابط الرافعة, ومعدات ROV واجهت جميعها مشاكل تشغيلية وفشلًا في المكونات. لم تتمكن السفينة من اجتياز التجارب البحرية ولم تتمكن من قبول العقود البحرية.[1]
السفينة سبقت مكتب الشحن الأمريكي الحالي (ABS) المبادئ التوجيهية التوافقية وتم وضعها تحت المعيار الأقدم. عندما تم تحديد الترقية, لم يكن الامتثال التوافقي من متطلبات التصميم. فقط بعد حالات الفشل أثناء التجارب البحرية تم فحص التخفيف التوافقي كشرط أساسي لوضع السفينة في الخدمة.[1]
02 لماذا فشل التخفيف الحالي؟
لم تكن السفينة خالية من التخفيف التوافقي - فقد كان لديها مخطط قائم يتكون من محولات تحويل الطور تعمل بالتوازي مع محاثات مطابقة للممانعة. هذا ترتيب زائف متعدد النبضات: عن طريق تحويل العرض على مراحل إلى مجموعات القيادة الفردية, القصد من ذلك هو إلغاء التيارات التوافقية من المجموعات المختلفة في ناقل العرض المشترك.
فشل المخطط في تقليل تشويه الجهد إلى مستويات مقبولة, وفي وقت لاحق كان هذا متوقعا. تعتمد إستراتيجيات النبضات الزائفة المتعددة التحولات الطورية على التيارات التوافقية من مجموعات القيادة الفردية التي تكون متساوية في الحجم ومعاكسة في الطور عند نقطة الإلغاء. يعمل هذا بشكل جيد مع أجهزة ASD من نوع PWM ذات التوقيعات التوافقية المتسقة. لا يعمل مع محركات الأقراص DC المستندة إلى الثايرستور.[1]
مزيج من المحتوى التوافقي المتغير عبر محركات الأقراص DC الخمسة التي تعمل في وقت واحد بأحمال مختلفة, بالإضافة إلى الإحراز تخفيف, أنتجت 20%+ تم قياس THDv أثناء التجارب البحرية. لم تكن إجراءات التخفيف الحالية مجرد صغيرة الحجم، بل كانت تقنية خاطئة للتطبيق.
03 محركات التيار المستمر وإحراز التبديل: الآلية وراء الفشل
3.1 كيف يؤدي تخفيف الثايرستور إلى إحداث شقوق الجهد
يقوم محرك الثايرستور DC بتصحيح جهد إمداد التيار المتردد لإنتاج ناقل DC متحكم فيه. في كل حدث تبديل - عندما ينتقل التوصيل من ثايرستور إلى الثايرستور التالي - هناك فترة قصيرة يتم خلالها قصر دائرة إمداد التيار المتردد بشكل فعال من خلال الثايرستور الموصل. ينهار جهد الإمداد عند مدخل محرك الأقراص إلى ما يقرب من الصفر طوال مدة زاوية تداخل التبديل. هذه هي درجة الجهد.[2]
تنتشر شقوق الجهد مرة أخرى إلى شبكة الإمداد وتظهر عند كل نقطة من نقاط التوصيل المشتركة على نفس الناقل. وتعتمد شدتها على ممانعة المصدر، فكلما زادت الممانعة, كلما كانت الشق أعمق وأوسع. في نظام طاقة السفينة ذو معاوقة مصدر عالية نسبيًا (المولدات بدلا من شبكة المرافق), الشقوق شديدة وتؤثر على جميع الأجهزة المتصلة في وقت واحد.
3.2 لماذا تسبب الشقوق فشل المعدات
شقوق الجهد عالية التردد, اضطرابات عالية السعة. أنظمة التحكم الرقمية – أجهزة الكمبيوتر الملاحية, وحدات تحكم الرافعة PLC, إلكترونيات محرك ROV - قم بأخذ عينة من جهد الإمداد للمزامنة والتوقيت. يمكن تفسير درجة الجهد في اللحظة الخطأ على أنها تقاطع صفري, مما يسبب أخطاء التوقيت, مشغلات كاذبة, أو رحلات خطأ صريح. هذا هو وضع الفشل الذي أدى إلى تعطيل أدوات التحكم في الرافعة ومعدات ROV على هذه السفينة: ليس الضرر الحراري من التوافقيات المستمرة, ولكن تعطيل نظام التحكم من الإحراز عابرة.[1]
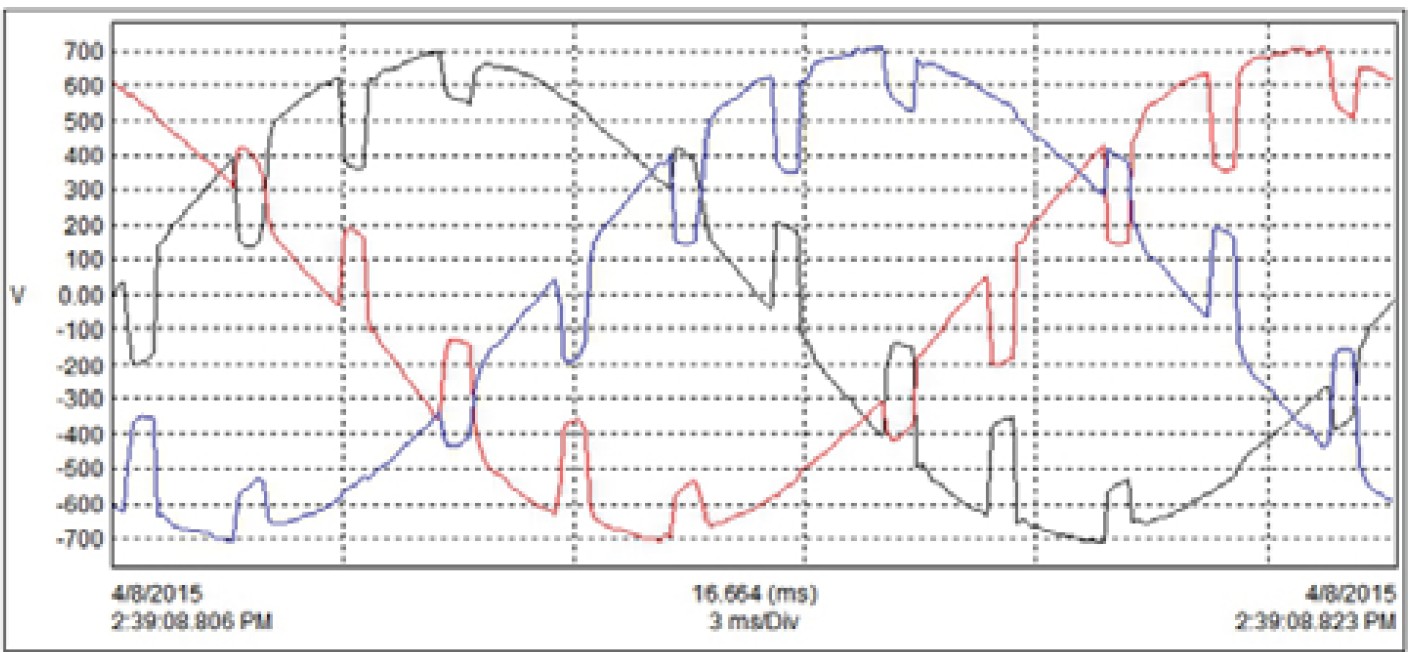
تين. 1. 480شكل موجة جهد الناقل V في أسوأ الظروف - مولدان, 100% سرعة الدفع, ربطة عنق الحافلة مفتوحة. ثدف = 20.89%. إن التشويه الشديد لشكل الموجة وإحراز التبديل واضح للعيان. مصدر: ميروس الدولية.[1]
3.3 صورة المحاكاة – SOLV™ تحليل
قبل الالتزام باستراتيجية التخفيف, أجرى Mirus وNSOEM مراجعة كاملة للسفينة على مستوى النظام واستخدما Mirus’ SOLV الملكية™ harmonic simulation software to model the complete vessel electrical system — generators, distribution transformers, DC drives at various operating points, and the proposed filter configuration. The simulation workflow had two stages:[1]
- Pre-filter baseline — simulated THDv at the distribution panel with original equipment: 13% on the port side alone, consistent with field measurements
- Post-filter prediction — simulated THDv with MOS Lineators on each DC drive: 5.8% — well within the ABS 8% حد
The close agreement between initial simulation and field-measured pre-filter condition validated the software model. This gave confidence that the post-filter simulation result was reliable before any hardware was ordered or installed.
04 حل: MOS Lineator — Filter Design for Marine Duty
4.1 Why a marine-specific filter
المرشحات التوافقية الصناعية القياسية ليست مناسبة للتطبيقات البحرية. البيئة – الاهتزاز, الهواء المالح, رطوبة, ركوب الدراجات في درجة الحرارة - يتطلب بناء مختلف. هيئات التصنيف البحرية (ABS, دنف, سجل لويدز) فرض متطلبات محددة على المعدات الكهربائية المثبتة على متن السفن, بما في ذلك المرشحات التوافقية.[3] ميروس موس (Marine and Offshore Specific) تم تطوير Lineator لتلبية هذه المتطلبات مع الحفاظ على أداء التخفيف التوافقي لجهاز Lineator AUHF القياسي.[1]
4.2 معايير اختيار عامل التصفية الرئيسية لهذا التطبيق
- تخفيض توافقي واسع الطيف - يجب تخفيف الكامل, يتم تشغيل الطيف التوافقي المتغير للثايرستور DC عبر جميع نقاط التشغيل, وليس فقط طيف نقطة التصميم
- التخفيف من درجة التبديل - يعمل محاثة المرشح على تخفيف شدة الشق عن طريق الحد من معدل التغير الحالي أثناء تداخل التبديل
- قطع أمان بنك مكثف ABS - وفقًا لمعايير ABS الجديدة, يجب أن يقوم المرشح بفصل بنك المكثف تلقائيًا في حالة حدوث خطأ في المكثف أثناء الحفاظ على تشغيل المرشح التوافقي. يتضمن MOS Lineator هذا كميزة قياسية
- مراقبة السلامة الزائدة — المراقبة الوقائية في المراحل المبكرة مع التنبيهات المتكررة, مناسبة لسفينة DP ذات الأهمية القصوى للسلامة
- مغلف التحديثية المدمجة - تم تقليل اختراقات الهيكل والسطح للتجديد بواسطة مجموعة المرشح المدمجة
4.3 استراتيجية النشر – التثبيت المرحلي خلال موسم الأعاصير
تم إجراء الاختبار التجريبي البحري ونشر المرشح خلال موسم الأعاصير في خليج المكسيك. وقد فرض هذا قيدا غير عادي: كان على السفينة أن تحتفظ بقدرة الدفع في جميع الأوقات في حالة تطلب العاصفة إعادة تحديد موقعها. ولذلك، تم توصيل المرشحات مجموعة واحدة في كل مرة - التثبيت, اختبار, التحقق من الامتثال لنظام ABS والتوافق التشغيلي, ثم انتقل إلى المجموعة التالية. فقط عندما تم تأكيد كل مرحلة، تحرك الفريق للأمام.[1]
تم تركيب وحدات MOS Lineator Type T على جانب الخط لكل وحدة من الوحدات الأربع 3,000 محركات HP Propulsion DC و 1,500 محرك DC ذو الدفع القوسي القابل للسحب من HP — خمسة مرشحات في المجمل. تمت إزالة محولات تحويل الطور الزائفة ومعدات الحث.
05 النتائج: الامتثال لنظام ABS في جميع ظروف التشغيل
5.1 تشويه الجهد - أسوأ حالة للامتثال
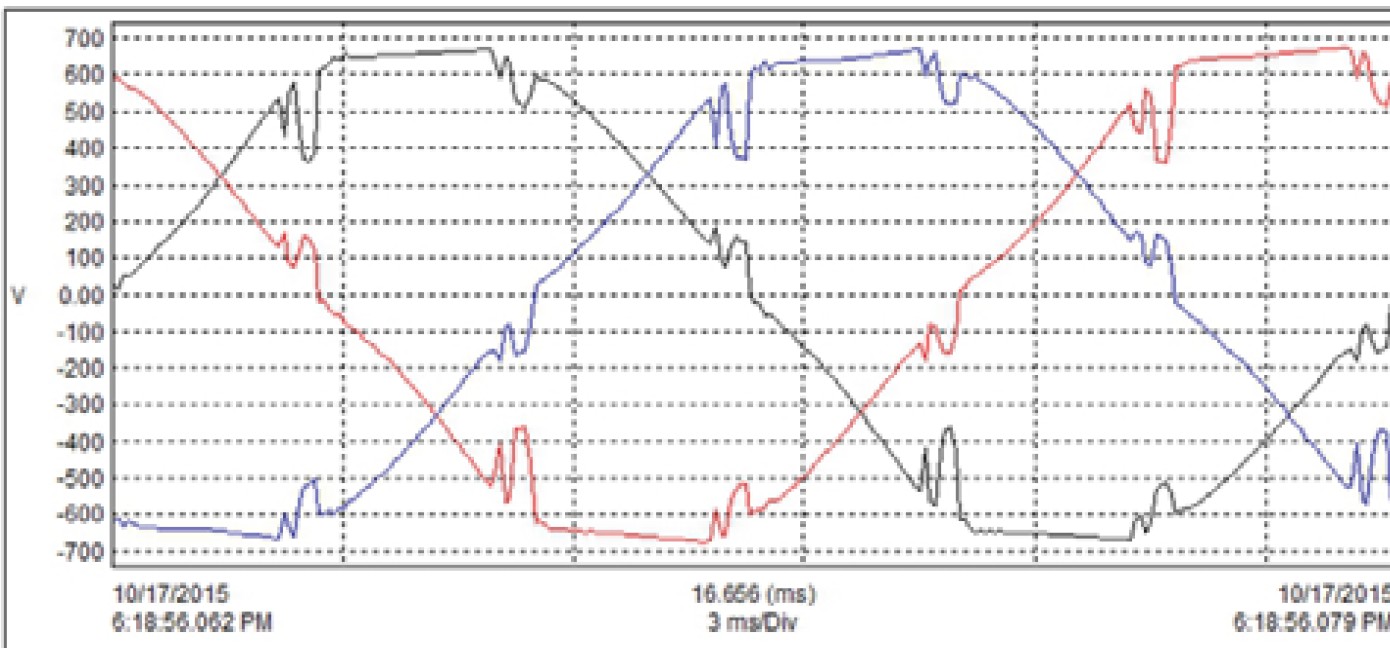
تين. 2. 480شكل موجة جهد الناقل V في أسوأ حالة لعملية تحديد المواقع الديناميكية بعد تثبيت MOS Lineator. ثدف = 7.8% - داخل ABS 8% حد. قارن ب 20.89% حالة التصفية المسبقة في الشكل. 1. مصدر: ميروس الدولية.[1]
تم إسقاط الحافلة 480V THDv من 20.89% (أسوأ حالة ما قبل التصفية, مولدين, 100% سرعة, ربطة عنق الحافلة مفتوحة) إلى 7.8% في سيناريو ما يعادل أسوأ حالة لتحديد المواقع الديناميكية بعد الفلتر - أسفل ABS 8% حد. في جميع ظروف التشغيل التي تم اختبارها, بقي THDv أدناه 8%.[1]
5.2 بيانات اختبار القوس الدافع - ملف تعريف الحمل المتغير
و 1,500 تم اختبار محرك الدفع القوسي القابل للسحب من HP عبر نطاق سرعته الكامل مع تشغيل جميع المولدات الأربعة. توضح النتائج فعالية الفلتر عبر نطاق تحميل واسع:[1]
| مرجع السرعة | مولدات | ربطة عنق الحافلة | ثدف | تي دي آي | الجهد |
|---|---|---|---|---|---|
| 25% | 4 | مغلق | 0.54 - 0.62% | 26 - 30.7% | 603 في |
| 50% | 4 | مغلق | 0.7 - 0.9% | 13.83 - 13.93% | 602 في |
| 75% | 4 | مغلق | 1.23 - 1.3% | 7.4 - 7.52% | 600 في |
| 100% | 4 | مغلق | 0.9 - 0.97% | 5.6 - 5.65% | 599 في |
لاحظ ارتفاع THDi عند 25% سرعة (26-30.7%). هذه هي سمة محركات الثايرستور DC عند زوايا إطلاق منخفضة - يكون شكل الموجة الحالي أكثر تشوهًا عند الحمل الخفيف. على الرغم من هذا, يبقى تشويه الجهد أدناه 1% عند نقطة التشغيل هذه لأن الحجم المطلق للتيارات التوافقية منخفض عند 25% حمولة. وهذا يوضح تمييزا هاما: THDi وTHDv ليسا مقياسين قابلين للتبديل - لا يعني ارتفاع THDi عند الحمل الخفيف بالضرورة وجود THDv مرتفع.
5.3 أسوأ نتائج اختبار تحديد المواقع الديناميكية
| حالة التشغيل | مولدات | ثدف | الجهد | ملحوظات |
|---|---|---|---|---|
| Auto DP — جميع أجهزة الدفع | جميع | 2.63 - 2.84% | 479 في | تحميل متغير |
| معارضة ثابتة DP - جميع الدفاعات 100% | جميع | 7.76 - 7.85% | 471 في | الحد الأقصى للضغط التوافقي |
| السرعة الكاملة للأمام — المنفذ والميمنة 100% | جميع | 6.50 - 6.62% | 473 - 478 في | لا يوجد دي دي تي أو تي تي |
أسوأ الحالات هي DP المتعارض الثابت مع جميع الدفاعات 100% - أنتج 7.76-7.85% THDv. هذا هو سيناريو التحميل التوافقي الأكثر خطورة على هذه السفينة: جميع محركات الأقراص في وقت واحد عند التحميل الكامل, يدفعون ضد بعضهم البعض للحفاظ على موقفهم ضد الرياح والتيار. حتى في ظل هذا الشرط, بقي النظام داخل ABS 8% حد.[1]
06 منظور جودة الطاقة: ما توضحه دراسة الحالة هذه
6.1 إحراز التبديل – المشكلة التوافقية التي لا تحظى بالتقدير الكافي
تركز معظم المناقشات التوافقية الصناعية على التيار THDi والجهد THDv كما تم قياسه بواسطة محلل الطاقة في حالة مستقرة. يعد إحراز التبديل فئة مختلفة من الاضطراب - فهو عبارة عن فترة زمنية عابرة تحدث بمعدل يمكن التنبؤ به (ست مرات لكل دورة لجسر الثايرستور ذو 6 نبضات) ولكن مع الخصائص التي لا يلتقطها قياس THD في الحالة المستقرة بشكل كامل. عمق الشق, عرض, والمنطقة هي المعلمات ذات الصلة لتقييم توافق المعدات, وهذه هي وظائف مقاومة المصدر وزاوية إطلاق المحرك - وليس فقط حجم المحرك.[2]
IEEE 519 عناوين الإحراز في جدولها 10.3 حدود على عمق الشق ومنطقة الشق. لدى ABS أحكام مماثلة للتطبيقات البحرية. في كلتا الحالتين, هذه الحدود موجودة على وجه التحديد لأن إلكترونيات التحكم معرضة لأخطاء التوقيت الناجمة عن الشق - وهو بالضبط وضع الفشل الذي لوحظ على هذه السفينة.
6.2 تي دي مقابل. THDv - شذوذ الحمل الخفيف
إن بيانات اختبار الصاروخ القوسي تجعل نقطة تستحق التأكيد عليها: في 25% سرعة, كان THDi 26-30٪ بينما كان THDv أقل من ذلك 1%. في 100% سرعة, انخفض THDi إلى 5.6-5.65% بينما كان THDv 0.9-0.97%.. تم تحسين كلا المقياسين مع الحمل, لكن THDi بدأ أعلى بكثير. هذه ليست مفارقة - إنها نتيجة لكيفية تعريف THD كنسبة مئوية من الأساسيات.
عند الحمل الخفيف, التيار الأساسي صغير. التيارات التوافقية, بينما صغيرة من حيث القيمة المطلقة, هي جزء كبير من عنصر أساسي صغير - ينتج THDi عاليًا. تتدفق نفس التيارات التوافقية المطلقة الصغيرة عبر ممانعة المصدر وتنتج تشوهًا صغيرًا في الجهد المطلق - وبالتالي انخفاض THDv. الدرس العملي: يتطلب تقييم التأثير التوافقي على الشبكة النظر إلى THDv وأحجام التيار التوافقي المطلقة, لا THDi وحده.
6.3 المحاكاة قبل التثبيت — التسلسل الصحيح
دراسة الحالة هذه, مثل قضية خط أنابيب Plains All-American, يوضح قيمة المحاكاة التوافقية قبل شراء المرشح. SOLV™ نموذج متوقع 5.8% مرشح ما بعد THDv على الدائرة بجانب المنفذ; وكانت النتيجة المقاسة ميدانيا 7.8% في أسوأ سيناريو DP للسفينة الكاملة - اتفاق معقول بالنظر إلى الأحمال الدافعة الإضافية غير الموجودة في محاكاة جانب المنفذ فقط. أعطت المحاكاة ثقة كافية لتحديد نوع وحجم المرشح الصحيحين, تجنب اتباع نهج التجربة والخطأ باهظ الثمن على متن سفينة عاملة.
6.4 الاتصال بسلسلة IPQDF
دراستي الحالة السابقتين في هذه السلسلة (مرشح الموجة الجيبية ESP, خط أنابيب السهول الأمريكية) تم التعامل مع محركات PWM ذات 6 نبضات ومحركات الثايرستور DC على التوالي, سواء في الأنظمة الجزرية الأرضية. تعمل دراسة الحالة هذه على توسيع الصورة لتشمل التطبيقات البحرية وتقدم إحراز التخفيف كآلية فشل متميزة عن التسخين التوافقي المستمر. معاً, تغطي دراسات الحالة الثلاث هذه الفئات الرئيسية من المشاكل التوافقية التي تمت مواجهتها في المنشآت الصناعية والبحرية التي تغذيها المولدات.
المقالات التقنية في هذه السلسلة (المواد 1-3) معالجة نفس الظواهر التوافقية من الجانب النظري – الأطياف الحالية, تفاعل الشبكة, التأثيرات الحركية. تُظهر دراسات الحالة ما يحدث عندما تُترك هذه الظواهر دون تخفيف في الأنظمة الحقيقية. عادة ما يتم قياس الفجوة بين النظرية والنتيجة بالمعدات الفاشلة والإيرادات المفقودة.
المراجع
- [1] شركة ميروس الدولية, “دراسة حالة خط MOS: التخفيف التوافقي للواجب البحري يحفظ برنامج سفن الخدمة البحرية,” دراسة حالة التطبيق, برامبتون, أونتاريو, كندا, 2016. متاح: mirusinternational.com/moslineator
- [2] IEEE الأمراض المنقولة جنسيا 519-2022, “معيار IEEE للتحكم التوافقي في أنظمة الطاقة الكهربائية,” IEEE, نيويورك, NY, 2022. (قسم على إحراز الجهد, جدول 10.3.)
- [3] المكتب الأمريكي للشحن (ABS), “ملاحظات إرشادية حول التحكم في التوافقيات في أنظمة الطاقة الكهربائية,” ABS, هيوستن, تكساس.