
La mitigación de armónicos del servicio marítimo salva un programa de buques de servicio en alta mar — Mirus International
| Solicitud | Buque de suministro y servicios en alta mar: propulsión eléctrica de CC |
| Unidades | cuatro 3,000 Unidades de propulsión HP DC + uno 1,500 Unidad de CC de hélice de proa retráctil HP |
| Distribución | 600 En / 480 Sistema de energía del buque V, múltiples generadores |
| Modo de funcionamiento | Posicionamiento dinámico (PD) — crítico para la seguridad, tolerancia cero ante la inestabilidad |
| Prefiltro THDv | Hasta 20.89% — superó todos los estándares, causó fallas en el equipo |
| Filtro armónico | Lineador Mirus MOS tipo T (Específico marino y offshore) |
| Post-filtro THDv | < 8% en todas las condiciones de funcionamiento: compatible con ABS |
| Organismo de certificación | Oficina Americana de Transporte Marítimo (ABS) |
01 Contexto operativo: Un barco que no pudo ir a trabajar
Se compró y actualizó un buque de suministro y servicios en alta mar equipado con propulsión eléctrica de CC para ampliar su alcance de trabajo para la industria del petróleo y el gas en alta mar.. Las actualizaciones incluyeron sistemas de navegación mejorados., Vehículo operado a distancia de mayor capacidad (ROV) equipo, y sistemas de grúa y elevación mejorados. La intención era sencilla: buque más capaz, Más contratos generadores de ingresos..[1]
El resultado fue el contrario.. El nuevo equipo demostró ser mucho más sensible a la distorsión de voltaje que los sistemas originales.. Durante las pruebas en el mar, Se excedieron los niveles de distorsión armónica de tensión. 20% mientras opera en posicionamiento dinámico (PD) Modo: la capacidad de mantenimiento de posición de precisión que los operadores marinos requieren para trabajar cerca de equipos de perforación y plataformas de producción.. Los fracasos cayeron en cascada: sistemas de navegación, controles de grúa, y el equipo ROV experimentaron problemas operativos y fallas de componentes. El barco no pudo pasar las pruebas en el mar y no pudo aceptar contratos en alta mar..[1]
El buque es anterior a la actual Oficina Estadounidense de Transporte Marítimo. (ABS) pautas armónicas y estaba protegido bajo el estándar anterior. Cuando se especificó la actualización, El cumplimiento armónico no era un requisito de diseño.. Sólo después de los fallos durante las pruebas en el mar se examinó la mitigación de armónicos como requisito previo para la puesta en servicio del buque..[1]
02 Por qué falló la mitigación existente
El buque no carecía de mitigación de armónicos: tenía un esquema existente que consistía en transformadores desfasadores que operaban en paralelo con inductores de impedancia adaptada.. Esta es una disposición pseudo-multipulso.: mediante el cambio de fase del suministro a grupos de accionamiento individuales, La intención es hacer que las corrientes armónicas de diferentes grupos se cancelen en el bus de suministro común..
El plan no logró reducir la distorsión de voltaje a niveles aceptables., y en retrospectiva esto era predecible. Las estrategias de pseudopulsos múltiples desfasadas se basan en que las corrientes armónicas de los grupos de accionamiento individuales sean iguales en magnitud y opuestas en fase en el punto de cancelación.. Esto funciona razonablemente bien para ASD tipo PWM con firmas armónicas consistentes.. No funciona para unidades de CC basadas en tiristores.[1]
La combinación de contenido armónico variable en los cinco variadores de CC que funcionan simultáneamente con diferentes cargas, más muescas de conmutación, produjo el 20%+ THDv medido durante las pruebas en el mar. La mitigación existente no era simplemente insuficiente: era la tecnología incorrecta para la aplicación..
03 Variadores de CC y muescas de conmutación: El mecanismo detrás de los fracasos
3.1 Cómo la conmutación de tiristores crea muescas de voltaje
Un variador de CC con tiristor rectifica el voltaje de suministro de CA para producir un bus de CC controlado. En cada evento de conmutación (cuando la conducción se transfiere de un tiristor al siguiente) hay un breve período durante el cual dos fases del suministro de CA se cortocircuitan efectivamente a través de los tiristores conductores.. La tensión de alimentación en la entrada del variador colapsa hasta casi cero durante la duración del ángulo de superposición de conmutación.. Esta es una muesca de voltaje.[2]
Las muescas de voltaje se propagan nuevamente a la red de suministro y aparecen en cada punto de acoplamiento común en el mismo bus.. Su gravedad depende de la impedancia de la fuente: cuanto mayor sea la impedancia, cuanto más profunda y ancha sea la muesca. En un sistema de energía de embarcación con una impedancia de fuente relativamente alta (Generadores en lugar de una red eléctrica.), Las muescas son graves y afectan a todos los equipos conectados simultáneamente..
3.2 Por qué las muescas provocan fallos en los equipos
Las muescas de voltaje son de alta frecuencia., perturbaciones de gran amplitud. Sistemas de control digital: ordenadores de navegación, Controladores PLC para grúas, Electrónica de accionamiento del ROV: muestree el voltaje de suministro para sincronización y temporización. Una caída de tensión en el momento equivocado puede interpretarse como un cruce por cero., causando errores de sincronización, falsos desencadenantes, o viajes de falla total. Este es el modo de falla que inhabilitaba los controles de la grúa y el equipo ROV en esta embarcación.: no daño térmico por armónicos sostenidos, pero la interrupción del sistema de control debido a muescas transitorias.[1]
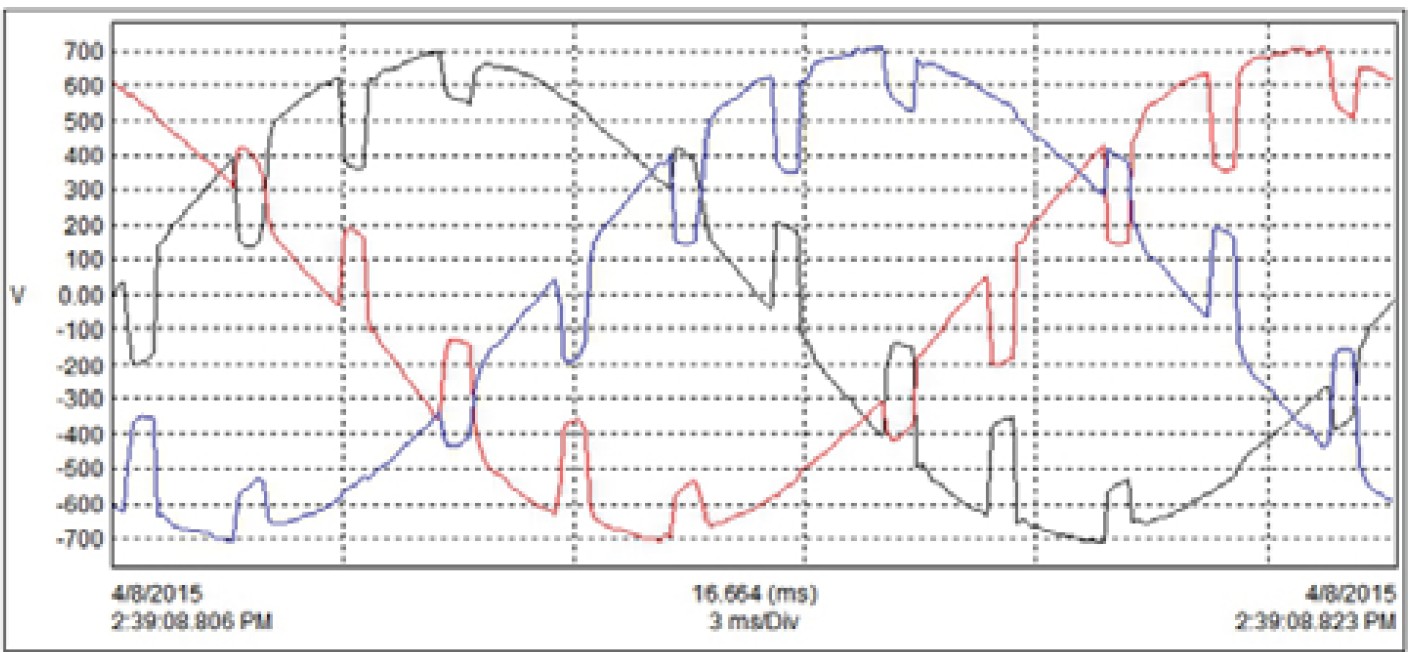
Higo. 1. 480Forma de onda de voltaje del bus V en las peores condiciones: dos generadores, 100% velocidad de propulsión, corbata de autobús abierta. THDv = 20.89%. La severa distorsión de la forma de onda y las muescas de conmutación son claramente visibles.. Fuente: Mirus Internacional.[1]
3.3 La imagen de simulación - SOLV™ análisis
Antes de comprometerse con una estrategia de mitigación, Mirus y NSOEM realizaron una revisión completa del buque en todo el sistema y utilizaron Mirus’ SOLV propietario™ Software de simulación armónica para modelar el sistema eléctrico completo del barco: generadores., transformadores de distribución, Accionamientos CC en varios puntos de funcionamiento, y la configuración de filtro propuesta. El flujo de trabajo de simulación tuvo dos etapas.:[1]
- Línea base previa al filtro — THDv simulado en el panel de distribución con equipo original: 13% solo en el lado de babor, consistente con mediciones de campo
- Predicción posterior al filtro — THDv simulado con linealizadores MOS en cada unidad de CC: 5.8% — bien dentro del ABS 8% límite
La estrecha concordancia entre la simulación inicial y la condición del prefiltro medida en el campo validó el modelo de software.. Esto dio confianza en que el resultado de la simulación posterior al filtro era confiable antes de ordenar o instalar cualquier hardware..
04 Solución: MOS Lineator: diseño de filtro para uso marítimo
4.1 Por qué un filtro específico para uso marino
Los filtros de armónicos industriales estándar no son adecuados para aplicaciones marinas.. El medio ambiente: vibración, aire salado, humedad, Ciclos de temperatura: exigen una construcción diferente.. Organismos de clasificación marina (ABS, DNV, Registro de Lloyd) imponer requisitos específicos a los equipos eléctricos instalados a bordo de buques, incluyendo filtros armónicos.[3] El Mirus MOS (Específico marino y offshore) Lineator fue desarrollado para cumplir con estos requisitos y al mismo tiempo mantener el rendimiento de mitigación de armónicos del Lineator AUHF estándar..[1]
4.2 Criterios clave de selección de filtros para esta aplicación
- Reducción de armónicos de amplio espectro — debe atenuar la totalidad, Espectro armónico variable de los variadores de CC con tiristores en todos los puntos de funcionamiento., no sólo el espectro de puntos de diseño
- Mitigación de muesca de conmutación — la inductancia del filtro amortigua la severidad de la muesca al limitar la tasa de cambio de corriente durante la superposición de conmutación
- Desconexión de seguridad de batería de condensadores ABS — según las nuevas normas ABS, El filtro debe desconectar automáticamente el banco de capacitores si ocurre una falla en el capacitor mientras se mantiene el funcionamiento del filtro de armónicos.. El MOS Lineator lo incorpora como característica estándar
- Monitoreo de seguridad redundante — monitoreo protector en etapa temprana con alertas redundantes, apropiado para un recipiente de DP de seguridad crítica
- Envolvente de reequipamiento compacto — las penetraciones en el casco y la cubierta para la modernización se minimizaron gracias al conjunto de filtro compacto
4.3 Estrategia de implementación: instalación por etapas durante la temporada de huracanes
La prueba de mar y el despliegue del filtro se llevaron a cabo durante la temporada de huracanes en el Golfo de México.. Esto impuso una restricción inusual: el buque tenía que conservar la capacidad de propulsión en todo momento en caso de que una tormenta requiriera reposicionamiento. Por lo tanto, los filtros se conectaron uno por uno: instalar, prueba, verificar el cumplimiento del ABS y la compatibilidad operativa, luego continúe con el siguiente conjunto. Sólo cuando se confirmó cada etapa el equipo avanzó..[1]
Las unidades MOS Lineator tipo T se instalaron en el lado de la línea de cada uno de los cuatro 3,000 Unidades de CC de propulsión HP y el 1,500 Propulsión de CC de hélice de proa retráctil HP: cinco filtros en total. Se eliminó el equipo inductor y transformador pseudodesfasador existente..
05 Resultados: Cumplimiento de ABS en todas las condiciones de funcionamiento
5.1 Distorsión de voltaje: peor caso para cumplir
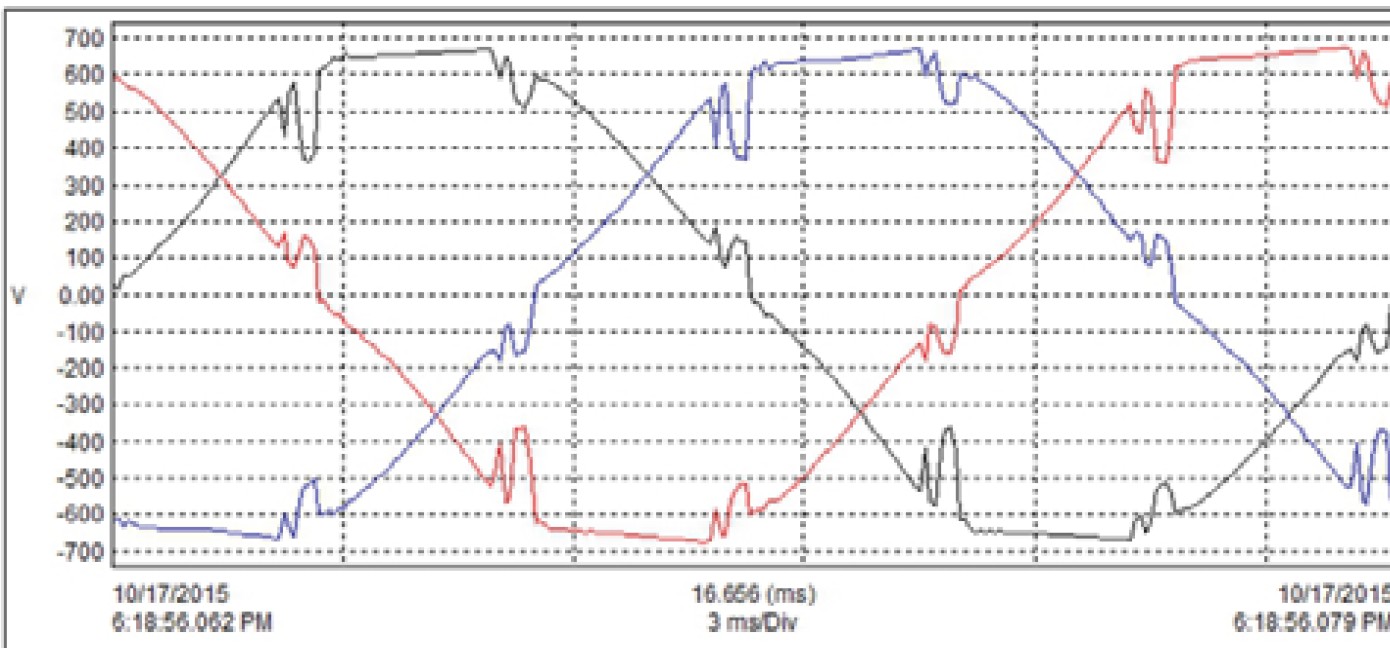
Higo. 2. 480Forma de onda de voltaje del bus V en el peor de los casos, operación de posicionamiento dinámico después de la instalación del MOS Lineator. THDv = 7.8% — dentro del ABS 8% límite. Comparar con el 20.89% condición del prefiltro en la Fig.. 1. Fuente: Mirus Internacional.[1]
El bus THDv de 480 V cayó de 20.89% (prefiltro en el peor de los casos, dos generadores, 100% velocidad, corbata de autobús abierta) a 7.8% en el post-filtro del escenario de posicionamiento dinámico equivalente en el peor de los casos: debajo del ABS 8% límite. En todas las condiciones operativas probadas, THDv permaneció por debajo 8%.[1]
5.2 Datos de prueba de la hélice de proa: perfil de carga variable
La 1,500 La hélice de proa retráctil HP se probó en todo su rango de velocidad con los cuatro generadores en línea. Los resultados demuestran la eficacia del filtro en un amplio rango de carga.:[1]
| Referencia de velocidad | Generadores | corbata de autobus | THDv | THDi | Voltaje |
|---|---|---|---|---|---|
| 25% | 4 | Cerrado | 0.54 - 0.62% | 26 - 30.7% | 603 En |
| 50% | 4 | Cerrado | 0.7 - 0.9% | 13.83 - 13.93% | 602 En |
| 75% | 4 | Cerrado | 1.23 - 1.3% | 7.4 - 7.52% | 600 En |
| 100% | 4 | Cerrado | 0.9 - 0.97% | 5.6 - 5.65% | 599 En |
Tenga en cuenta el elevado THDi en 25% velocidad (26–30,7%). Esto es característico de los variadores de CC con tiristores en ángulos de disparo bajos: la forma de onda de la corriente se distorsiona más con una carga ligera.. A pesar de esto, la distorsión de voltaje permanece por debajo 1% en este punto de operación porque la magnitud absoluta de las corrientes armónicas es baja en 25% cargar. Esto ilustra una distinción importante: THDi y THDv no son métricas intercambiables: un THDi alto con carga ligera no implica necesariamente un THDv alto.
5.3 Resultados de la prueba de posicionamiento dinámico en el peor de los casos
| Condiciones de funcionamiento | Generadores | THDv | Voltaje | Notas |
|---|---|---|---|---|
| Auto DP: todos los propulsores | Todo | 2.63 - 2.84% | 479 En | Carga variable |
| DP opuesto estático: todos los propulsores 100% | Todo | 7.76 - 7.85% | 471 En | Tensión armónica máxima |
| Avance a toda velocidad: babor y estribor 100% | Todo | 6.50 - 6.62% | 473 - 478 En | Sin DDT ni TT |
El peor de los casos: DP opuesto estático con todos los propulsores en 100% — produjo entre 7,76% y 7,85% THDv. Este es el escenario de carga armónica más severo posible en este buque.: todas las unidades simultáneamente a plena carga, Empujándose unos contra otros para mantener la posición contra el viento y la corriente.. Incluso bajo esta condición, el sistema permaneció dentro del ABS 8% límite.[1]
06 La perspectiva de la calidad de la energía: Lo que ilustra este estudio de caso
6.1 Muesca de conmutación: el problema armónico subestimado
La mayoría de las discusiones sobre armónicos industriales se centran en el THDi actual y el voltaje THDv medidos por un analizador de potencia en estado estable.. La muesca de conmutación es una categoría diferente de perturbación: es un transitorio en el dominio del tiempo que ocurre a un ritmo predecible. (seis veces por ciclo para un puente de tiristores de 6 pulsos) pero con características que la medición de THD en estado estacionario no captura completamente. La profundidad de la muesca, ancho, y el área son los parámetros relevantes para evaluar la compatibilidad del equipo, y estas son funciones de la impedancia de la fuente y del ángulo de disparo del variador, no solo del tamaño del variador..[2]
IEEE 519 aborda las muescas en su tabla 10.3 límites en la profundidad y el área de la muesca. ABS tiene disposiciones análogas para aplicaciones marinas.. En ambos casos, Los límites existen específicamente porque la electrónica de control es vulnerable a errores de sincronización inducidos por muescas, exactamente el modo de falla observado en esta embarcación..
6.2 THDi frente a. THDv: la anomalía de la carga ligera
Los datos de las pruebas de la hélice de proa resaltan un punto que vale la pena destacar.: en 25% velocidad, THDi fue del 26% al 30%, mientras que el THDv estuvo por debajo 1%. En 100% velocidad, THDi había caído a 5,6–5,65% mientras que THDv estaba entre 0,9–0,97%. Ambas métricas mejoraron con la carga., pero THDi empezó mucho más alto. Esto no es una paradoja: es una consecuencia de cómo se define el THD como porcentaje del valor fundamental..
Con carga ligera, la corriente fundamental es pequeña. Las corrientes armónicas, aunque pequeño en términos absolutos, son una gran fracción de un pequeño fundamental: producen un alto THDi. Las mismas pequeñas corrientes armónicas absolutas fluyen a través de la impedancia de la fuente y producen una pequeña distorsión de voltaje absoluta, por lo tanto, un THDv bajo.. La lección práctica: La evaluación del impacto armónico en la red requiere observar THDv y las magnitudes de corriente armónica absoluta., no solo THDi.
6.3 Simulación antes de la instalación: la secuencia correcta
Este estudio de caso, como el caso del oleoducto Plains All-American, demuestra el valor de la simulación armónica antes de la adquisición del filtro. El SOLV™ modelo predicho 5.8% Postfiltro THDv en el circuito de babor; el resultado medido en el campo fue 7.8% en el peor de los casos, escenario DP de embarcación completa: un acuerdo razonable dadas las cargas adicionales del propulsor que no están presentes en la simulación solo en el lado de babor. La simulación proporcionó suficiente confianza para especificar el tipo y tamaño de filtro correctos., evitando un costoso enfoque de prueba y error en un barco en funcionamiento.
6.4 Conexión a la serie IPQDF
Los dos estudios de caso anteriores de esta serie (Filtro de onda sinusoidal ESP, Oleoducto Plains All-American) se ocuparon de unidades PWM de 6 pulsos y unidades de CC de tiristores, respectivamente, tanto en sistemas insulares terrestres. Este estudio de caso amplía el panorama a aplicaciones marinas e introduce las muescas de conmutación como un mecanismo de falla distinto del calentamiento armónico sostenido.. Juntos, Estos tres estudios de caso cubren las principales categorías de problemas armónicos encontrados en instalaciones industriales y marinas alimentadas por generadores..
Los artículos técnicos de esta serie. (Artículos 1 a 3) abordar los mismos fenómenos armónicos desde el punto de vista teórico: espectros de corriente, interacción de red, efectos motores. Los estudios de caso muestran lo que sucede cuando esos fenómenos no se mitigan en sistemas reales.. La brecha entre la teoría y las consecuencias generalmente se mide en equipos fallidos y pérdida de ingresos..
Referencias
- [1] Mirus Internacional Inc., “Estudio de caso del linealizador MOS: La mitigación de armónicos de servicio marítimo salva el programa de buques de servicio costa afuera,” Estudio de caso de aplicación, brampton, Ontario, Canadá, 2016. Disponible: mirusinternational.com/moslineator
- [2] IEEE Std 519-2022, “Estándar IEEE para control de armónicos en sistemas de energía eléctrica,” IEEE, Nueva York, Nueva York, 2022. (Sección sobre muescas de voltaje, Mesa 10.3.)
- [3] Oficina Americana de Transporte Marítimo (ABS), “Notas orientativas sobre el control de armónicos en sistemas de energía eléctrica,” ABS, Houston, Texas.