
海事谐波抑制拯救了近海服务船计划 — Mirus International
| 应用 | 近海供应和服务船 — 直流电力推进 |
| 驱动器 | 四 3,000 HP 直流推进驱动器 + 一 1,500 HP 伸缩式艏推进器直流驱动 |
| 分配 | 600 在 / 480 V船动力系统, 多台发电机 |
| 运行模式 | 动态定位 (DP) — 安全关键, 对不稳定零容忍 |
| 预滤波器 THDv | 高达 20.89% — 超出所有标准, 造成设备故障 |
| 谐波滤波器 | Mirus MOS Lineator T 型 (海洋和近海专用) |
| 后置滤波器 THDv | < 8% 在所有操作条件下 - 符合 ABS 标准 |
| 认证机构 | 美国船级社 (ABS) |
01 操作环境: 无法上班的船只
购买并升级一艘配备直流电力推进的海上供应和服务船,以扩大其在海上石油和天然气行业的工作范围. 升级包括增强的导航系统, 增容遥控车 (遥控潜水器) 设备, 以及升级的起重机和升降系统. 意图很简单: 能力更强的船只, 更多创收合同.[1]
结果却适得其反. 事实证明,新设备对电压失真比原来的系统更加敏感. 海试期间, 超过电压谐波失真水平 20% 在动态定位模式下操作时 (DP) 模式——海上操作员在钻机和生产平台附近工作所需的精确位置保持能力. 级联故障: 导航系统, 起重机控制装置, 和 ROV 设备都遇到了操作问题和部件故障. 该船无法通过海试,无法接受海上合同.[1]
该船的历史早于现在的美国船级社 (ABS) 谐波准则并在旧标准下被继承. 当指定升级时, 谐波合规性不是设计要求. 只有在海上试验期间出现故障后,才将谐波抑制检查作为船舶投入使用的先决条件.[1]
02 为什么现有的缓解措施失败了
该船并非没有谐波抑制功能——它的现有方案由与阻抗匹配电感器并联运行的移相变压器组成. 这是伪多脉冲排列: 通过对各个驱动组的供电进行相移, 目的是使来自不同组的谐波电流在公共电源总线中抵消.
该方案未能将电压畸变降低到可接受的水平, 回想起来,这是可以预见的. 相移伪多脉冲策略依赖于来自各个驱动组的谐波电流在抵消点处大小相等且相位相反. 这对于具有一致谐波特征的 PWM 型 ASD 来说效果相当好. 它不适用于基于晶闸管的直流驱动器.[1]
在不同负载下同时运行的五个直流驱动器的可变谐波含量的组合, 加上换向缺口, 产生了 20%+ 海上试验期间测量的 THDv. 现有的缓解措施不仅规模过小,而且技术不适合该应用程序.
03 直流驱动器和换向陷波: 失败背后的机制
3.1 晶闸管换相如何产生电压缺口
晶闸管直流驱动器对交流电源电压进行整流,以产生受控的直流母线. 在每次换向事件中——当导通从一个晶闸管转移到下一个时——都会有一个短暂的时期,在此期间交流电源的两相通过导通晶闸管有效地短路. 在换相重叠角期间,驱动器输入端的电源电压降至接近零. 这是一个电压缺口.[2]
电压缺口传播回供电网络并出现在同一总线上的每个公共耦合点. 它们的严重程度取决于源阻抗——阻抗越高, 凹口越深越宽. 在源阻抗相对较高的船舶电力系统上 (发电机而不是公用电网), 缺口很严重,会同时影响所有连接的设备.
3.2 为什么缺口会导致设备故障
电压陷波是高频的, 高振幅干扰. 数字控制系统——导航计算机, 起重机PLC控制器, ROV 驱动电子设备 — 对电源电压进行采样以实现同步和定时. 错误时刻的电压缺口可被解释为过零, 造成计时错误, 错误触发, 或直接故障跳闸. 这是导致该船上的起重机控制和 ROV 设备失效的故障模式: 不会因持续谐波而造成热损坏, 但控制系统会因瞬态陷波而中断.[1]
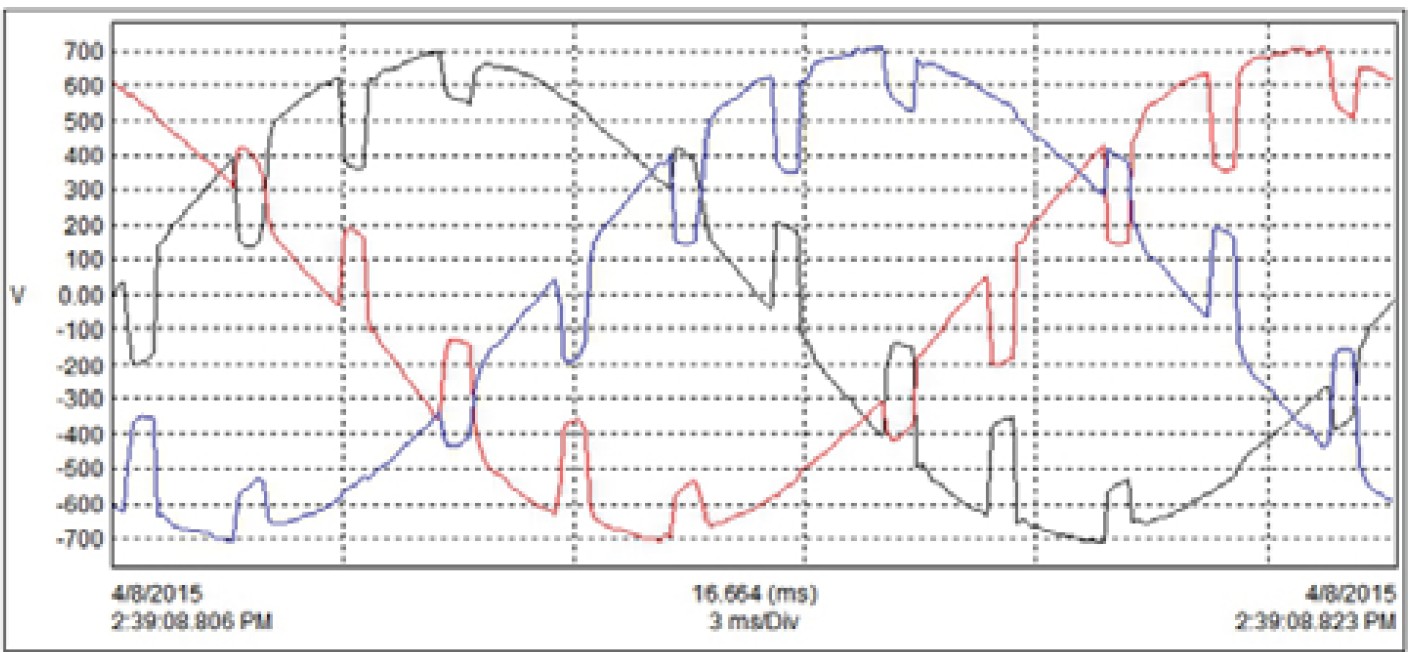
无花果. 1. 480最坏情况下的 V 总线电压波形 — 两台发电机, 100% 推进速度, 总线连接打开. 总谐波失真 = 20.89%. 严重的波形畸变和换相陷波清晰可见. 源: 米鲁斯国际.[1]
3.3 仿真图——SOLV™ 分析
在采取缓解策略之前, Mirus 和 NSOEM 进行了完整的全系统船舶审查并使用了 Mirus’ 专有解决方案™ 谐波仿真软件可对整个船舶电气系统(发电机)进行建模, 配电变压器, 不同工作点的直流驱动器, 和建议的过滤器配置. 模拟工作流程有两个阶段:[1]
- 预过滤基线 — 使用原始设备在配电盘上模拟 THDv: 13% 仅在左舷, 与现场测量一致
- 滤波器后预测 — 每个直流驱动器上使用 MOS 线性器模拟 THDv: 5.8% — 完全在 ABS 范围内 8% 限制
初始模拟与现场测量的预过滤条件之间的密切一致性验证了软件模型. 这让我们确信在订购或安装任何硬件之前,后置滤波器模拟结果是可靠的.
04 解: MOS Lineator — 适用于船舶的滤波器设计
4.1 为什么选择船用专用过滤器
标准工业谐波滤波器不适合船舶应用. 环境——振动, 盐空气, 湿度, 温度循环——需要不同的结构. 海洋分类机构 (ABS, 挪威船级社, 劳埃德船级社) 对船上安装的电气设备提出具体要求, 包括谐波滤波器.[3] 米鲁斯 MOS (海洋和近海专用) Lineator 的开发是为了满足这些要求,同时保持标准 Lineator AUHF 的谐波抑制性能.[1]
4.2 此应用的关键过滤器选择标准
- 广谱谐波抑制 - 必须充分衰减, 晶闸管直流驱动器在所有工作点上的可变谐波频谱, 不仅仅是设计点谱
- 换向缺口缓解 — 滤波器电感通过限制换相重叠期间的电流变化率来抑制陷波严重程度
- ABS 电容器组安全断开 — 根据新的 ABS 标准, 如果在保持谐波滤波器运行的同时发生电容器故障,滤波器必须自动断开电容器组. MOS Lineator 将此作为标准功能
- 冗余安全监控 — 具有冗余警报的早期保护性监控, 适用于安全关键的 DP 船舶
- 紧凑型改造围护结构 — 紧凑型过滤器组件最大限度地减少了改造时对船体和甲板的渗透
4.3 部署策略——飓风季节分阶段安装
海试测试和过滤器部署是在墨西哥湾飓风季节进行的. 这施加了一个不寻常的限制: 船舶必须始终保持推进能力,以防风暴需要重新定位. 因此,一次连接一组过滤器 — 安装, 测试, 验证 ABS 合规性和操作兼容性, 然后进行下一组. 只有每个阶段都确定了,团队才会前进.[1]
MOS Lineator T 型装置安装在四个线路的线路侧 3,000 HP 推进直流驱动器和 1,500 HP 伸缩式船首推进器直流驱动 — 总共五个过滤器. 拆除现有的伪移相变压器和电感设备.
05 结果: 所有操作条件下的 ABS 合规性
5.1 电压失真——最坏情况下的合规性
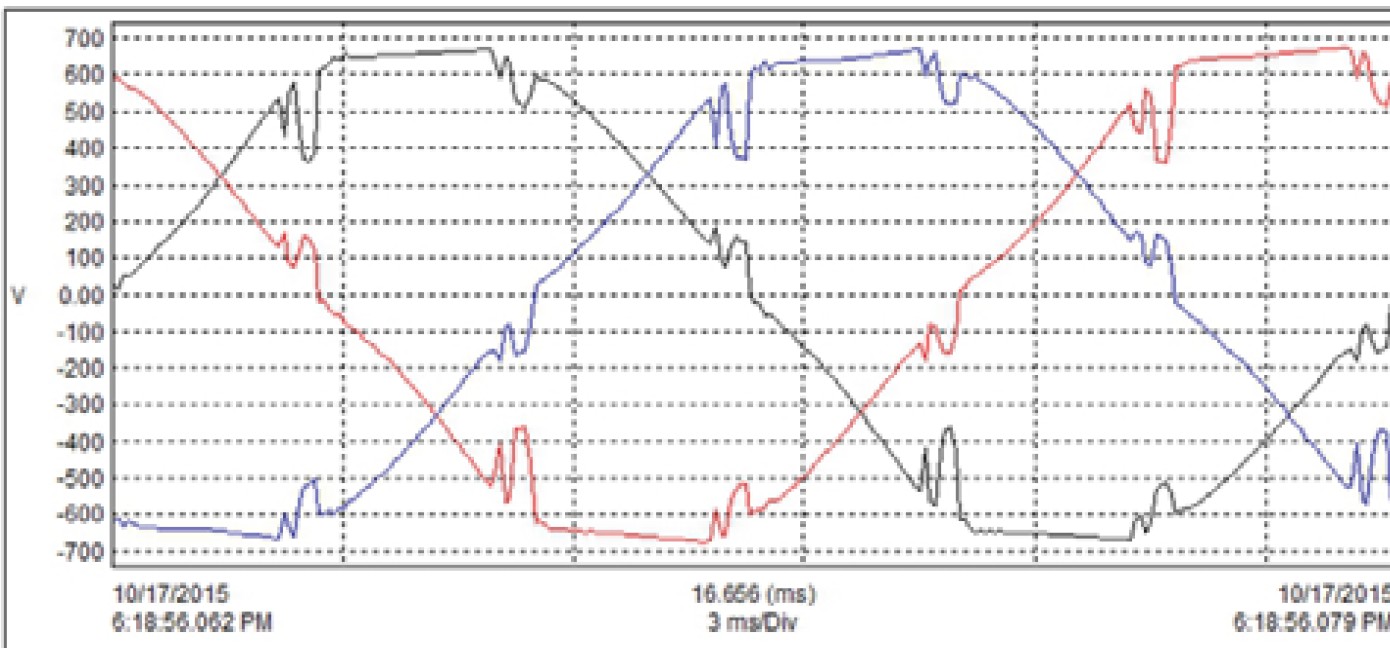
无花果. 2. 480安装 MOS Lineator 后最坏情况动态定位操作中的 V 总线电压波形. 总谐波失真 = 7.8% — 在 ABS 内 8% 限制. 比较 20.89% 图 预过滤条件. 1. 源: 米鲁斯国际.[1]
480V总线THDv从 20.89% (最坏情况预过滤器, 两台发电机, 100% 速度, 总线连接打开) 至 7.8% 在等效的最坏情况动态定位场景后置滤波器中 — 低于 ABS 8% 限制. 在所有测试的操作条件下, THDv 仍低于 8%.[1]
5.2 艏侧推进器测试数据——可变负载曲线
“ 1,500 HP 伸缩式艏推进器在所有四台发电机均在线的情况下在全速度范围内进行了测试. 结果证明了过滤器在宽负载范围内的有效性:[1]
| 速度参考值 | 发电机 | 巴士领带 | 总谐波失真 | 总谐波失真 | 电压 |
|---|---|---|---|---|---|
| 25% | 4 | 关闭 | 0.54 - 0.62% | 26 - 30.7% | 603 在 |
| 50% | 4 | 关闭 | 0.7 - 0.9% | 13.83 - 13.93% | 602 在 |
| 75% | 4 | 关闭 | 1.23 - 1.3% | 7.4 - 7.52% | 600 在 |
| 100% | 4 | 关闭 | 0.9 - 0.97% | 5.6 - 5.65% | 599 在 |
请注意 THDi 升高 25% 速度 (26–30.7%). 这是晶闸管直流驱动器在低触发角时的特性——轻负载时电流波形更加失真. 尽管如此, 电压畸变保持在以下水平 1% 在此工作点,因为谐波电流的绝对幅度较低 25% load. 这说明了一个重要的区别: THDi 和 THDv 不是可互换的指标 - 轻负载时高 THDi 并不一定意味着高 THDv.
5.3 最坏情况动态定位测试结果
| 使用条件 | 发电机 | 总谐波失真 | 电压 | 笔记 |
|---|---|---|---|---|
| Auto DP — 所有推进器 | 所有 | 2.63 - 2.84% | 479 在 | 可变负载 |
| 静态反向 DP — 所有推进器 100% | 所有 | 7.76 - 7.85% | 471 在 | 最大谐波应力 |
| 全速前进——左舷和右舷 100% | 所有 | 6.50 - 6.62% | 473 - 478 在 | 无 DDT 或 TT |
最坏的情况 — 所有推进器处于静态反向 DP 100% — 产生 7.76–7.85% THDv. 这是该船可能遇到的最严重的谐波载荷情况: 所有驱动器同时满载, 相互推挤以保持位置以抵御风和水流. 即使在这样的条件下, 该系统仍属于 ABS 范围内 8% 限制.[1]
06 电能质量视角: 这个案例研究说明了什么
6.1 换相陷波——未被重视的谐波问题
大多数工业谐波讨论都集中在稳定状态下功率分析仪测量的电流 THDi 和电压 THDv. 换相陷波是一种不同类别的干扰——它是一种以可预测的速率发生的时域瞬态 (6 脉冲晶闸管桥每个周期六次) 但具有稳态 THD 测量无法完全捕获的特性. 缺口深度, 宽度, 和面积是评估设备兼容性的相关参数, 这些是源阻抗和驱动器触发角的函数——而不仅仅是驱动器尺寸.[2]
IEEE 519 解决了表中的缺口问题 10.3 缺口深度和缺口面积的限制. ABS 对于海洋应用也有类似的规定. 在这两种情况下, 这些限制的存在是因为控制电子设备很容易受到缺口引起的计时误差的影响——这正是在这艘船上观察到的故障模式.
6.2 总谐波失真比. THDv — 轻载异常
船首推进器测试数据值得强调: 在 25% 速度, THDi 为 26–30%,而 THDv 低于 1%. 在 100% 速度, THDi 已降至 5.6–5.65%,而 THDv 为 0.9–0.97%. 这两个指标都随着负载的增加而改善, 但 THDi 的起点要高得多. 这并不是一个悖论——这是 THD 被定义为基波百分比的结果.
轻负载时, 基波电流小. 谐波电流, 虽然绝对值很小, 是小基波的很大一部分——产生高 THDi. 相同的小绝对谐波电流流过源阻抗并产生小的绝对电压失真 - 因此 THDv 较低. 实践课: 评估谐波对网络的影响需要查看 THDv 和绝对谐波电流幅度, 不仅仅是 THDi.
6.3 安装前模拟——正确的顺序
本案例研究, 就像平原全美管道案例, 展示滤波器采购前谐波仿真的价值. 解决方案™ 模型预测 5.8% 端口侧电路上的 THDv 后置滤波器; 现场测量结果为 7.8% 在最坏的全船动态定位场景中——考虑到仅左舷模拟中不存在的额外推进器负载,这是一个合理的协议. 模拟给出了足够的信心来指定正确的过滤器类型和尺寸, 避免在工作船上进行昂贵的试错方法.
6.4 连接至 IPQDF 系列
本系列的前两个案例研究 (ESP正弦波滤波器, 平原全美管道) 分别处理6脉冲PWM驱动和晶闸管直流驱动, 都在陆基孤岛系统中. 本案例研究将图像扩展到海洋应用,并引入换向陷波作为与持续谐波加热不同的故障机制. 一起, 这三个案例研究涵盖了发电机供电的工业和船舶设施中遇到的谐波问题的主要类别.
本系列的技术文章 (第 1-3 条) 从理论角度解决相同的谐波现象——电流谱, 网络互动, 运动效应. 案例研究展示了当这些现象在真实系统中不加缓解时会发生什么. 理论与后果之间的差距通常以设备故障和收入损失来衡量.
参考文献
- [1] 米鲁斯国际公司, “MOS Lineator 案例研究: 海事谐波缓解可挽救近海服务船计划,” 应用案例研究, 布兰普顿, Ontario, 加拿大, 2016. 可用的: mirusinternational.com/moslineator
- [2] IEEE StD里 519-2022, “电力系统谐波控制 IEEE 标准,” IEEE, 纽约, 纽约, 2022. (电压陷波部分, 表 10.3.)
- [3] 美国船级社 (ABS), “电力系统谐波控制指南,” ABS, 休斯顿, TX.