
A mitigação de harmônicas de serviços marítimos salva um programa de embarcação de serviço offshore — Mirus International
| Aplicativo | Embarcação de abastecimento e serviço offshore - propulsão elétrica DC |
| Drives | Quatro 3,000 Unidades de propulsão HP DC + um 1,500 Unidade DC do propulsor de proa retrátil HP |
| Distribuição | 600 Em / 480 Sistema de energia da embarcação V, vários geradores |
| Modo de operação | Posicionamento Dinâmico (PD) - crítico para a segurança, tolerância zero à instabilidade |
| Pré-filtro THDv | Até 20.89% - excedeu todos os padrões, causou falhas no equipamento |
| Filtro harmônico | Lineador Mirus MOS Tipo T (Específico Marítimo e Offshore) |
| Pós-filtro THDv | < 8% sob todas as condições de operação - compatível com ABS |
| Organismo de certificação | Bureau Americano de Navegação (ABS) |
01 Contexto Operacional: Um navio que não poderia ir trabalhar
Uma embarcação de abastecimento e serviço offshore equipada com propulsão elétrica DC foi adquirida e atualizada para ampliar seu escopo de trabalho para a indústria offshore de petróleo e gás. As atualizações incluíram sistemas de navegação aprimorados, veículo operado remotamente de maior capacidade (ROV) equipamento, e sistemas atualizados de guindastes e elevadores. A intenção era direta: navio mais capaz, mais contratos geradores de receitas.[1]
O resultado foi o oposto. O novo equipamento provou ser muito mais sensível à distorção de tensão do que os sistemas originais. Durante os testes no mar, níveis de distorção harmônica de tensão excedidos 20% enquanto opera em Posicionamento Dinâmico (PD) modo — a capacidade de manutenção de estação de precisão que os operadores offshore exigem para trabalhar perto de plataformas de perfuração e plataformas de produção. Falhas em cascata: sistemas de navegação, controles de guindaste, e equipamentos ROV experimentaram problemas operacionais e falhas de componentes. A embarcação não pôde passar nos testes de mar e não pôde aceitar contratos offshore.[1]
O navio era anterior ao atual American Bureau of Shipping (ABS) diretrizes harmônicas e foi adquirido sob o padrão mais antigo. Quando a atualização foi especificada, conformidade harmônica não era um requisito de projeto. Somente após as falhas durante os testes de mar é que a mitigação de harmônicas foi examinada como um pré-requisito para colocar a embarcação em serviço.[1]
02 Por que a mitigação existente falhou
A embarcação não estava isenta de mitigação de harmônicas - ela tinha um esquema existente que consistia em transformadores de mudança de fase operando em paralelo com indutores de impedância casada.. Este é um arranjo pseudo multi-pulso: mudando a fase da alimentação para grupos de acionamento individuais, a intenção é fazer com que as correntes harmônicas de diferentes grupos sejam canceladas no barramento de alimentação comum.
O esquema não conseguiu reduzir a distorção de tensão a níveis aceitáveis, e em retrospecto isso era previsível. As estratégias de pseudo multipulsos com mudança de fase dependem de que as correntes harmônicas dos grupos de acionamento individuais sejam iguais em magnitude e opostas em fase no ponto de cancelamento. Isso funciona razoavelmente bem para ASDs do tipo PWM com assinaturas harmônicas consistentes. Não funciona para unidades DC baseadas em tiristores.[1]
A combinação de conteúdo harmônico variável nos cinco inversores CC operando simultaneamente em diferentes cargas, mais entalhe de comutação, produziu o 20%+ THDv medido durante testes no mar. A mitigação existente não era apenas subdimensionada — era a tecnologia errada para a aplicação.
03 Drives DC e entalhe de comutação: O mecanismo por trás das falhas
3.1 Como a comutação do tiristor cria entalhes de tensão
Um inversor CC tiristor retifica a tensão de alimentação CA para produzir um barramento CC controlado. Em cada evento de comutação - quando a condução é transferida de um tiristor para o próximo - há um breve período durante o qual duas fases da alimentação CA são efetivamente curto-circuitadas através dos tiristores condutores.. A tensão de alimentação na entrada do inversor cai para perto de zero durante o ângulo de sobreposição de comutação. Este é um entalhe de tensão.[2]
Os entalhes de tensão se propagam de volta para a rede de alimentação e aparecem em todos os pontos de acoplamento comum no mesmo barramento. A sua gravidade depende da impedância da fonte — quanto maior for a impedância, quanto mais profundo e largo o entalhe. Em um sistema de energia de embarcação com impedância de fonte relativamente alta (geradores em vez de uma rede de serviços públicos), entalhes são graves e afetam todos os equipamentos conectados simultaneamente.
3.2 Por que os entalhes causam falhas no equipamento
Os entalhes de tensão são de alta frequência, distúrbios de alta amplitude. Sistemas de controle digital – computadores de navegação, controladores PLC de guindaste, Eletrônica de acionamento do ROV — faça uma amostra da tensão de alimentação para sincronização e temporização. Um entalhe de tensão no momento errado pode ser interpretado como um cruzamento por zero, causando erros de tempo, gatilhos falsos, ou falhas definitivas. Este é o modo de falha que desativou os controles do guindaste e o equipamento ROV nesta embarcação: não é dano térmico de harmônicos sustentados, mas controlar a interrupção do sistema devido ao entalhe transitório.[1]
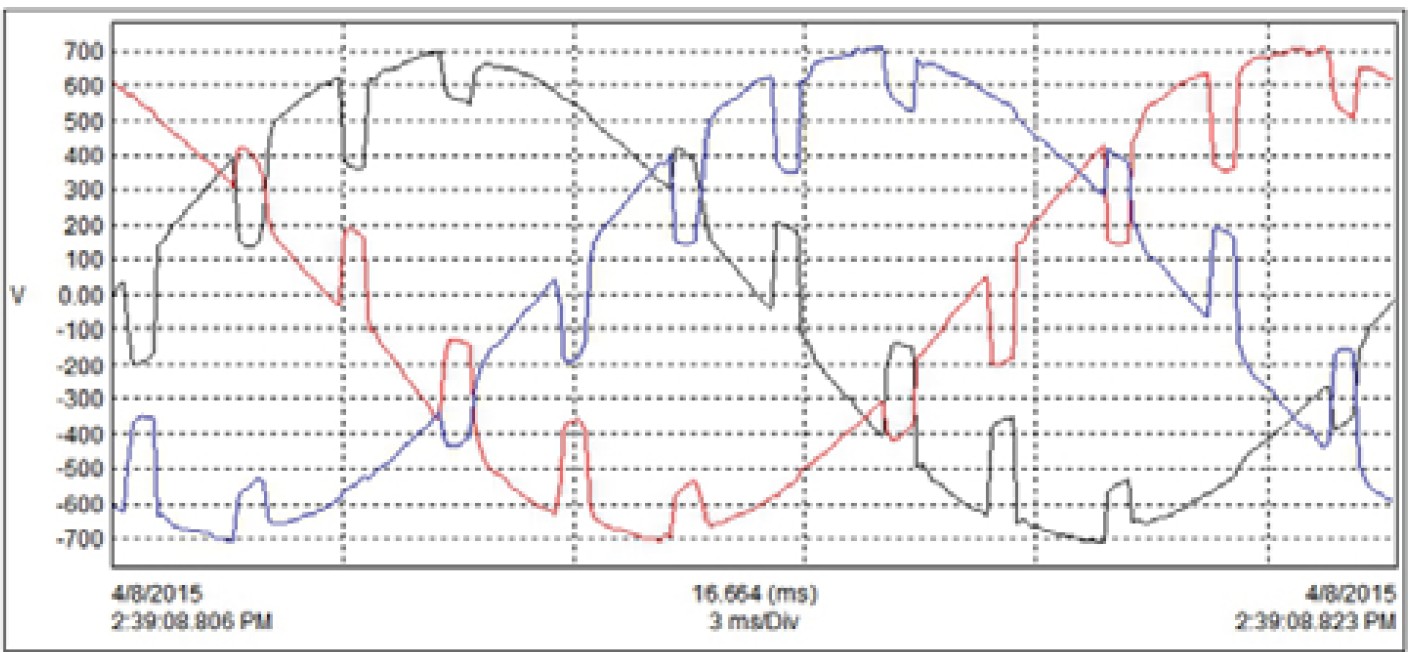
Figo. 1. 480Forma de onda da tensão do barramento V nas piores condições - dois geradores, 100% velocidade de propulsão, amarração do ônibus aberta. THDv = 20.89%. A grave distorção da forma de onda e o entalhe de comutação são claramente visíveis. Fonte: Mirus Internacional.[1]
3.3 A imagem da simulação – SOLV™ análise
Antes de se comprometer com uma estratégia de mitigação, A Mirus e a NSOEM realizaram uma revisão completa da embarcação em todo o sistema e usaram o Mirus’ SOLV proprietário™ software de simulação harmônica para modelar o sistema elétrico completo da embarcação – geradores, transformadores de distribuição, Drives DC em vários pontos operacionais, e a configuração de filtro proposta. O fluxo de trabalho de simulação teve duas etapas:[1]
- Linha de base do pré-filtro — THDv simulado no painel de distribuição com equipamento original: 13% só a bombordo, consistente com medições de campo
- Previsão pós-filtro — THDv simulado com Lineadores MOS em cada drive DC: 5.8% - bem dentro do ABS 8% limite
A estreita concordância entre a simulação inicial e a condição do pré-filtro medida em campo validou o modelo de software. Isso deu confiança de que o resultado da simulação pós-filtro era confiável antes de qualquer hardware ser encomendado ou instalado.
04 Solução: MOS Lineator — Projeto de filtro para serviços marítimos
4.1 Por que um filtro específico para o setor marítimo
Filtros harmônicos industriais padrão não são adequados para aplicações marítimas. O meio ambiente - vibração, ar salgado, umidade, ciclagem de temperatura - exige construção diferente. Organismos de classificação marítima (ABS, DNV, Registro do Lloyd's) impor requisitos específicos sobre equipamentos elétricos instalados a bordo de navios, incluindo filtros harmônicos.[3] O Mirus MOS (Específico Marítimo e Offshore) O Lineator foi desenvolvido para atender a esses requisitos, mantendo o desempenho de mitigação de harmônicas do Lineator AUHF padrão..[1]
4.2 Principais critérios de seleção de filtro para este aplicativo
- Redução harmônica de amplo espectro — deve atenuar a totalidade, espectro harmônico variável de drives CC de tiristores em todos os pontos de operação, não apenas o espectro do ponto de design
- Mitigação de entalhe de comutação — a indutância do filtro amortece a severidade do entalhe, limitando a taxa de mudança de corrente durante a sobreposição de comutação
- Desconexão de segurança do banco de capacitores ABS - de acordo com os novos padrões ABS, o filtro deve desconectar automaticamente o banco de capacitores se ocorrer uma falha no capacitor enquanto mantém a operação do filtro harmônico. O MOS Lineator incorpora isso como um recurso padrão
- Monitoramento de segurança redundante — monitoramento de proteção em estágio inicial com alertas redundantes, apropriado para uma embarcação DP crítica para a segurança
- Envelope de retroajuste compacto — as penetrações no casco e no convés para o retrofit foram minimizadas pelo conjunto de filtro compacto
4.3 Estratégia de implantação — instalação em etapas durante a temporada de furacões
Os testes de teste no mar e a implantação do filtro ocorreram durante a temporada de furacões no Golfo do México. Isso impôs uma restrição incomum: a embarcação tinha que manter a capacidade de propulsão em todos os momentos, caso uma tempestade exigisse o reposicionamento. Os filtros foram, portanto, conectados um conjunto de cada vez - instale, teste, verificar a conformidade do ABS e a compatibilidade operacional, então prossiga para o próximo conjunto. Somente quando cada etapa foi confirmada a equipe avançou.[1]
As unidades MOS Lineator Tipo T foram instaladas no lado da linha de cada um dos quatro 3,000 Unidades CC de propulsão HP e o 1,500 Unidade DC do propulsor de proa retrátil HP – cinco filtros no total. O pseudo transformador de mudança de fase e equipamento indutor existente foi removido.
05 Resultados: Conformidade com ABS sob todas as condições operacionais
5.1 Distorção de tensão — pior caso para conformidade
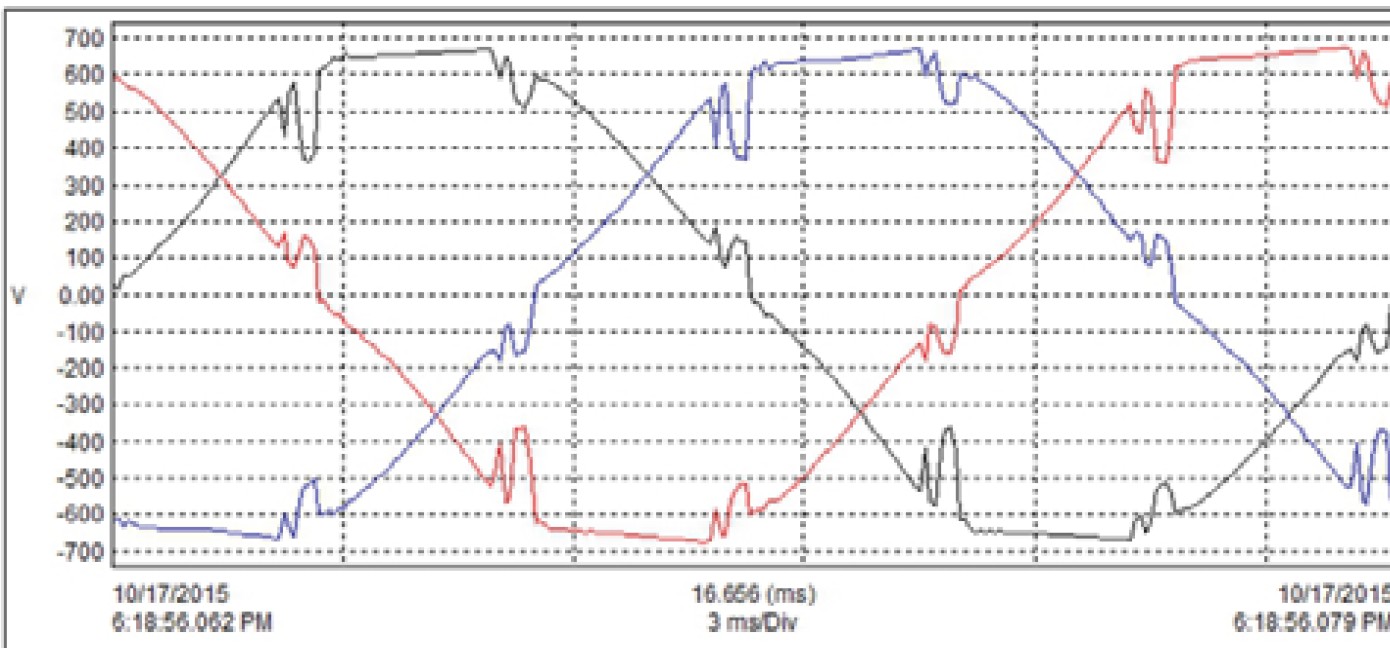
Figo. 2. 480Forma de onda da tensão do barramento V no pior caso de operação de posicionamento dinâmico após a instalação do MOS Lineator. THDv = 7.8% - dentro do ABS 8% limite. Compare com o 20.89% condição do pré-filtro na Fig. 1. Fonte: Mirus Internacional.[1]
O barramento 480V THDv caiu de 20.89% (pré-filtro de pior caso, dois geradores, 100% velocidade, amarração do ônibus aberta) para 7.8% no pior caso equivalente pós-filtro do cenário de Posicionamento Dinâmico - abaixo do ABS 8% limite. Em todas as condições operacionais testadas, THDv permaneceu abaixo 8%.[1]
5.2 Dados de teste do propulsor de proa — perfil de carga variável
O 1,500 O propulsor de proa retrátil HP foi testado em toda a sua faixa de velocidade com todos os quatro geradores em linha. Os resultados demonstram a eficácia do filtro em uma ampla faixa de carga:[1]
| Referência de velocidade | Geradores | Gravata de ônibus | THDv | THDi | Tensão |
|---|---|---|---|---|---|
| 25% | 4 | Fechado | 0.54 - 0.62% | 26 - 30.7% | 603 Em |
| 50% | 4 | Fechado | 0.7 - 0.9% | 13.83 - 13.93% | 602 Em |
| 75% | 4 | Fechado | 1.23 - 1.3% | 7.4 - 7.52% | 600 Em |
| 100% | 4 | Fechado | 0.9 - 0.97% | 5.6 - 5.65% | 599 Em |
Observe o THDi elevado em 25% velocidade (26–30,7%). Isso é característico de drives DC tiristores em ângulos de disparo baixos - a forma de onda da corrente é mais distorcida com carga leve. Apesar disso, a distorção de tensão permanece abaixo 1% neste ponto de operação porque a magnitude absoluta das correntes harmônicas é baixa em 25% carga. Isso ilustra uma distinção importante: THDi e THDv não são métricas intercambiáveis – um THDi alto com carga leve não implica necessariamente um THDv alto.
5.3 Resultados do teste de posicionamento dinâmico do pior caso
| Condição operacional | Geradores | THDv | Tensão | Notas |
|---|---|---|---|---|
| Auto DP – todos os propulsores | Todos | 2.63 - 2.84% | 479 Em | Carregamento variável |
| DP oposto estático – todos os propulsores 100% | Todos | 7.76 - 7.85% | 471 Em | Tensão harmônica máxima |
| Full speed forward — port and starboard 100% | Todos | 6.50 - 6.62% | 473 - 478 Em | No DDT or TT |
The worst case — static opposing DP with all thrusters at 100% — produced 7.76–7.85% THDv. This is the most severe harmonic loading scenario possible on this vessel: all drives simultaneously at full load, pushing against each other to hold position against wind and current. Even under this condition, the system remained within the ABS 8% limite.[1]
06 A Perspectiva da Qualidade de Energia: O que este estudo de caso ilustra
6.1 Notching de comutação — o problema harmônico subestimado
A maioria das discussões harmônicas industriais concentra-se na corrente THDi e na tensão THDv medida por um analisador de potência em estado estacionário. O entalhe de comutação é uma categoria diferente de perturbação – é um transitório no domínio do tempo que ocorre a uma taxa previsível (seis vezes por ciclo para uma ponte de tiristores de 6 pulsos) mas com características que a medição de THD em estado estacionário não captura totalmente. A profundidade do entalhe, largura, e área são os parâmetros relevantes para avaliar a compatibilidade do equipamento, e estas são funções da impedância da fonte e do ângulo de disparo do drive - não apenas do tamanho do drive.[2]
IEEE 519 aborda notching em sua tabela 10.3 limites de profundidade e área do entalhe. ABS tem disposições análogas para aplicações marítimas. Em ambos os casos, os limites existem especificamente porque a eletrônica de controle é vulnerável a erros de temporização induzidos por entalhes – exatamente o modo de falha observado nesta embarcação.
6.2 THDi vs.. THDv – a anomalia de carga leve
Os dados do teste do propulsor de proa destacam um ponto que vale a pena enfatizar: em 25% velocidade, O THDi foi de 26 a 30%, enquanto o THDv ficou abaixo 1%. Em 100% velocidade, O THDi caiu para 5,6–5,65%, enquanto o THDv foi de 0,9–0,97%. Ambas as métricas melhoraram com a carga, mas o THDi começou muito mais alto. Isto não é um paradoxo – é uma consequência de como o THD é definido como uma percentagem do valor fundamental..
Com carga leve, a corrente fundamental é pequena. As correntes harmônicas, embora pequeno em termos absolutos, são uma grande fração de um pequeno fundamental - produzindo alto THDi. As mesmas pequenas correntes harmônicas absolutas fluem através da impedância da fonte e produzem uma pequena distorção de tensão absoluta - portanto, baixo THDv. A lição prática: avaliar o impacto harmônico na rede requer observar o THDv e as magnitudes da corrente harmônica absoluta, não THDi sozinho.
6.3 Simulação antes da instalação — a sequência certa
Este estudo de caso, como o caso do oleoduto Plains All-American, demonstra o valor da simulação harmônica antes da aquisição do filtro. O SOLV™ modelo previsto 5.8% Pós-filtro THDv no circuito do lado da porta; o resultado medido em campo foi 7.8% no pior cenário DP de navio completo - um acordo razoável, dadas as cargas adicionais do propulsor não presentes na simulação apenas de bombordo. A simulação deu confiança suficiente para especificar o tipo e tamanho correto do filtro, evitando uma abordagem cara de tentativa e erro em uma embarcação em funcionamento.
6.4 Connection to the IPQDF series
The previous two case studies in this series (ESP sinewave filter, Plains All-American pipeline) dealt with 6-pulse PWM drives and thyristor DC drives respectively, both in land-based islanded systems. This case study extends the picture to marine applications and introduces commutation notching as a failure mechanism distinct from sustained harmonic heating. Together, estes três estudos de caso cobrem as principais categorias de problemas harmônicos encontrados em instalações industriais e marítimas alimentadas por geradores.
Os artigos técnicos desta série (Artigos 1–3) abordar os mesmos fenômenos harmônicos do lado teórico - espectros atuais, interação de rede, efeitos motores. Os estudos de caso mostram o que acontece quando esses fenômenos não são mitigados em sistemas reais. A lacuna entre a teoria e as consequências é geralmente medida em equipamentos com falha e perda de receita.
Referências
- [1] Mirus Internacional Inc., “Estudo de caso do Lineador MOS: A mitigação de harmônicas em serviço marítimo salva programa de navios de serviço offshore,” Estudo de caso de aplicação, Brampton, Ontário, Canadá, 2016. Disponível: mirusinternational.com/moslineator
- [2] IEEE Std 519-2022, “Padrão IEEE para Controle Harmônico em Sistemas Elétricos de Potência,” IEEE, Nova Iorque, Nova Iorque, 2022. (Seção sobre entalhe de tensão, Mesa 10.3.)
- [3] Bureau Americano de Navegação (ABS), “Notas de Orientação sobre Controle de Harmônicos em Sistemas Elétricos de Potência,” ABS, Houston, Texas.