
Harmonic Mitigation im Seedienst rettet ein Offshore-Serviceschiffprogramm – Mirus International
| Anwendung | Offshore-Versorgungs- und Serviceschiff – Gleichstrom-Elektroantrieb |
| Drives | Vier 3,000 HP-Gleichstromantriebsantriebe + eins 1,500 Einziehbares HP-Bugstrahlruder mit Gleichstromantrieb |
| Verteilung | 600 IN / 480 V-Schiffsantriebssystem, mehrere Generatoren |
| Betriebsart | Dynamische Positionierung (DP) – sicherheitskritisch, Null Toleranz gegenüber Instabilität |
| Vorfilter THDv | Bis 20.89% — alle Standards übertroffen, verursachte Geräteausfälle |
| Harmonischer Filter | Mirus MOS Lineator Typ T (Marine- und Offshore-spezifisch) |
| Nachfilter THDv | < 8% unter allen Betriebsbedingungen – ABS-konform |
| Zertifizierungsstelle | Amerikanisches Schifffahrtsbüro (ABS) |
01 Betriebskontext: Ein Schiff, das nicht zur Arbeit gehen konnte
Ein mit Gleichstrom-Elektroantrieb ausgestattetes Offshore-Versorgungs- und Serviceschiff wurde gekauft und modernisiert, um seinen Arbeitsumfang für die Offshore-Öl- und Gasindustrie zu erweitern. Zu den Upgrades gehörten verbesserte Navigationssysteme, Ferngesteuertes Fahrzeug mit erhöhter Kapazität (ROV) Ausrüstung, und verbesserte Kran- und Hebesysteme. Die Absicht war klar: leistungsfähigeres Schiff, mehr umsatzgenerierende Verträge.[1]
Das Ergebnis war das Gegenteil. Die neuen Geräte erwiesen sich als weitaus empfindlicher gegenüber Spannungsverzerrungen als die ursprünglichen Systeme. Bei Probefahrten, Oberwellenverzerrungspegel der Spannung überschritten 20% während des Betriebs in der dynamischen Positionierung (DP) Modus – die Fähigkeit zur präzisen Stationierung, die Offshore-Betreiber für Arbeiten in der Nähe von Bohrinseln und Produktionsplattformen benötigen. Fehler kaskadierten: Navigationssysteme, Kransteuerungen, Bei der ROV-Ausrüstung kam es bei allen zu Betriebsproblemen und Komponentenausfällen. Das Schiff bestand die Probefahrten nicht und konnte keine Offshore-Verträge annehmen.[1]
Das Schiff war älter als das heutige American Bureau of Shipping (ABS) Harmonische Richtlinien und wurde unter dem älteren Standard übernommen. Als das Upgrade angegeben wurde, Harmonische Konformität war keine Entwurfsanforderung. Erst nach den Ausfällen während der Seeerprobung wurde die Reduzierung der Oberschwingungen als Voraussetzung für die Indienststellung des Schiffes untersucht.[1]
02 Warum die bestehende Schadensbegrenzung fehlschlug
Das Schiff war nicht ohne Oberschwingungsminderung ausgestattet – es verfügte über ein bestehendes System, das aus Phasenschiebertransformatoren bestand, die parallel mit impedanzangepassten Induktivitäten arbeiteten. Dabei handelt es sich um eine Pseudo-Mehrpuls-Anordnung: durch Phasenverschiebung der Versorgung einzelner Antriebsgruppen, Ziel ist es, die Oberschwingungsströme verschiedener Gruppen in der gemeinsamen Versorgungsschiene aufzuheben.
Das Schema konnte die Spannungsverzerrung nicht auf ein akzeptables Maß reduzieren, und im Nachhinein war das vorhersehbar. Phasenverschobene Pseudo-Mehrpulsstrategien basieren darauf, dass die harmonischen Ströme der einzelnen Antriebsgruppen am Löschpunkt gleich groß und entgegengesetzt phasig sind. Dies funktioniert einigermaßen gut für ASDs vom PWM-Typ mit konsistenten harmonischen Signaturen. Es funktioniert nicht für Gleichstromantriebe auf Thyristorbasis.[1]
Die Kombination des variablen Oberschwingungsgehalts der fünf Gleichstromantriebe, die gleichzeitig mit unterschiedlichen Lasten betrieben werden, plus Kommutierungskerbung, produzierte die 20%+ THDv gemessen bei Probefahrten. Die vorhandenen Abhilfemaßnahmen waren nicht nur zu klein dimensioniert, sondern es handelte sich auch um die falsche Technologie für die Anwendung.
03 Gleichstromantriebe und Kommutierungskerbfunktion: Der Mechanismus hinter den Fehlern
3.1 Wie durch die Thyristorkommutierung Spannungseinbrüche entstehen
Ein Thyristor-Gleichstromantrieb richtet die Wechselstromversorgungsspannung gleich, um einen gesteuerten Gleichstrombus zu erzeugen. Bei jedem Kommutierungsereignis – wenn die Leitung von einem Thyristor zum nächsten wechselt – gibt es einen kurzen Zeitraum, in dem zwei Phasen der Wechselstromversorgung durch die leitenden Thyristoren effektiv kurzgeschlossen werden. Für die Dauer des Kommutierungsüberschneidungswinkels bricht die Versorgungsspannung am Antriebseingang auf nahezu Null zusammen. Dies ist eine Spannungskerbe.[2]
Spannungseinbrüche breiten sich zurück in das Versorgungsnetz aus und treten an jedem gemeinsamen Kopplungspunkt auf demselben Bus auf. Ihr Schweregrad hängt von der Quellenimpedanz ab – je höher die Impedanz, desto tiefer und breiter die Kerbe. Auf einem Schiffsstromnetz mit relativ hoher Quellenimpedanz (Generatoren anstelle eines öffentlichen Stromnetzes), Kerben sind schwerwiegend und wirken sich gleichzeitig auf alle angeschlossenen Geräte aus.
3.2 Warum Kerben zu Geräteausfällen führen
Spannungseinbrüche sind hochfrequent, Störungen mit hoher Amplitude. Digitale Steuerungssysteme – Navigationscomputer, Kran-SPS-Steuerungen, ROV-Antriebselektronik – messen Sie die Versorgungsspannung für Synchronisierung und Timing. Ein Spannungseinbruch im falschen Moment kann als Nulldurchgang interpretiert werden, was zu Zeitfehlern führen kann, falsche Auslöser, oder reine Fehlerauslösungen. Dies ist der Fehlermodus, der die Kransteuerung und ROV-Ausrüstung auf diesem Schiff deaktiviert hat: keine thermischen Schäden durch anhaltende Oberschwingungen, aber Störung des Steuerungssystems durch vorübergehendes Einkerben.[1]
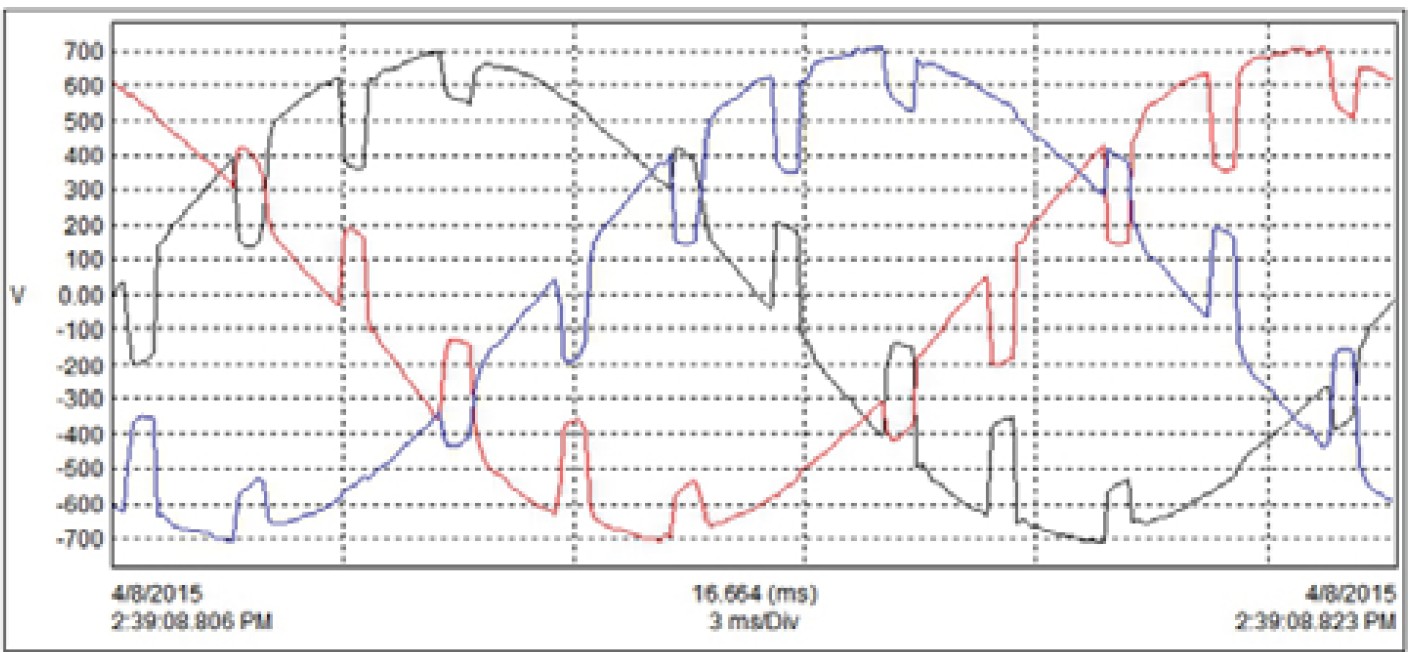
Abb.. 1. 480V-Bus-Spannungswellenform im ungünstigsten Fall – zwei Generatoren, 100% Antriebsgeschwindigkeit, Bus-Krawatte offen. THDv = 20.89%. Die starke Wellenformverzerrung und Kommutierungseinkerbung sind deutlich sichtbar. Quelle: Mirus International.[1]
3.3 Das Simulationsbild – SOLV™ Analyse
Bevor Sie sich auf eine Schadensbegrenzungsstrategie festlegen, Mirus und NSOEM führten eine vollständige systemweite Schiffsüberprüfung durch und verwendeten Mirus’ proprietäres SOLV™ Harmonische Simulationssoftware zur Modellierung des gesamten elektrischen Schiffssystems – Generatoren, Verteilungstransformatoren, Gleichstromantriebe in verschiedenen Betriebspunkten, und die vorgeschlagene Filterkonfiguration. Der Simulationsworkflow bestand aus zwei Phasen:[1]
- Grundlinie vorfiltern — Simulierter THDv am Verteilerfeld mit Originalausrüstung: 13% allein auf der Backbordseite, im Einklang mit Feldmessungen
- Vorhersage nach dem Filter — Simulierter THDv mit MOS-Lineatoren auf jedem DC-Antrieb: 5.8% – gut im ABS 8% Limit
Die enge Übereinstimmung zwischen der anfänglichen Simulation und dem vor Ort gemessenen Vorfilterzustand validierte das Softwaremodell. Dies gab die Gewissheit, dass das Ergebnis der Nachfiltersimulation zuverlässig war, bevor Hardware bestellt oder installiert wurde.
04 Lösung: MOS Lineator – Filterdesign für den Marineeinsatz
4.1 Warum ein marinespezifischer Filter
Standard-Industrie-Oberschwingungsfilter sind für den Einsatz in der Schifffahrt nicht geeignet. Die Umgebung – Vibration, salzige Luft, Luftfeuchtigkeit, Temperaturwechsel – erfordert eine andere Konstruktion. Meeresklassifizierungsstellen (ABS, DNV, Lloyd's Register) besondere Anforderungen an die an Bord von Schiffen installierte elektrische Ausrüstung stellen, einschließlich harmonischer Filter.[3] Der Mirus MOS (Marine- und Offshore-spezifisch) Lineator wurde entwickelt, um diese Anforderungen zu erfüllen und gleichzeitig die Oberschwingungsminderungsleistung des Standard-Lineator AUHF beizubehalten.[1]
4.2 Wichtige Filterauswahlkriterien für diese Anwendung
- Oberwellenreduzierung mit breitem Spektrum — muss das volle dämpfen, Variables Oberschwingungsspektrum von Thyristor-Gleichstromantrieben über alle Betriebspunkte hinweg, nicht nur das Designpunktspektrum
- Milderung von Kommutierungseinbrüchen — Die Filterinduktivität dämpft die Kerbwirkung, indem sie die Stromänderungsrate während der Kommutierungsüberlappung begrenzt
- Sicherheitsabschaltung der ABS-Kondensatorbank – gemäß den neuen ABS-Standards, Der Filter muss die Kondensatorbank automatisch trennen, wenn ein Kondensatorfehler auftritt, während der Betrieb des Oberschwingungsfilters aufrechterhalten bleibt. Der MOS Lineator verfügt standardmäßig über diese Funktion
- Redundante Sicherheitsüberwachung — Frühzeitige Schutzüberwachung mit redundanten Alarmen, geeignet für ein sicherheitskritisches DP-Schiff
- Kompakte Nachrüsthülle — Rumpf- und Deckdurchdringungen für die Nachrüstung wurden durch die kompakte Filterbaugruppe minimiert
4.3 Bereitstellungsstrategie – schrittweise Installation während der Hurrikansaison
Die Probefahrten auf See und der Filtereinsatz fanden während der Hurrikansaison im Golf von Mexiko statt. Dies führte zu einer ungewöhnlichen Einschränkung: Das Schiff musste jederzeit über seine Antriebsfähigkeit verfügen, falls ein Sturm eine Neupositionierung erforderlich machte. Daher wurden die Filter satzweise angeschlossen – installiert, Test, Überprüfen Sie die ABS-Konformität und Betriebskompatibilität, Fahren Sie dann mit dem nächsten Satz fort. Erst als jede Etappe bestätigt war, kam das Team weiter.[1]
Auf der Leitungsseite aller vier wurden MOS-Lineator-Einheiten vom Typ T installiert 3,000 HP-Antrieb, Gleichstromantriebe und die 1,500 Einziehbares HP-Bugstrahlruder mit Gleichstromantrieb – insgesamt fünf Filter. Der vorhandene Pseudo-Phasenschiebertransformator und die Induktorausrüstung wurden entfernt.
05 Ergebnisse: ABS-Konformität unter allen Betriebsbedingungen
5.1 Spannungsverzerrung – ungünstigster Fall zur Einhaltung
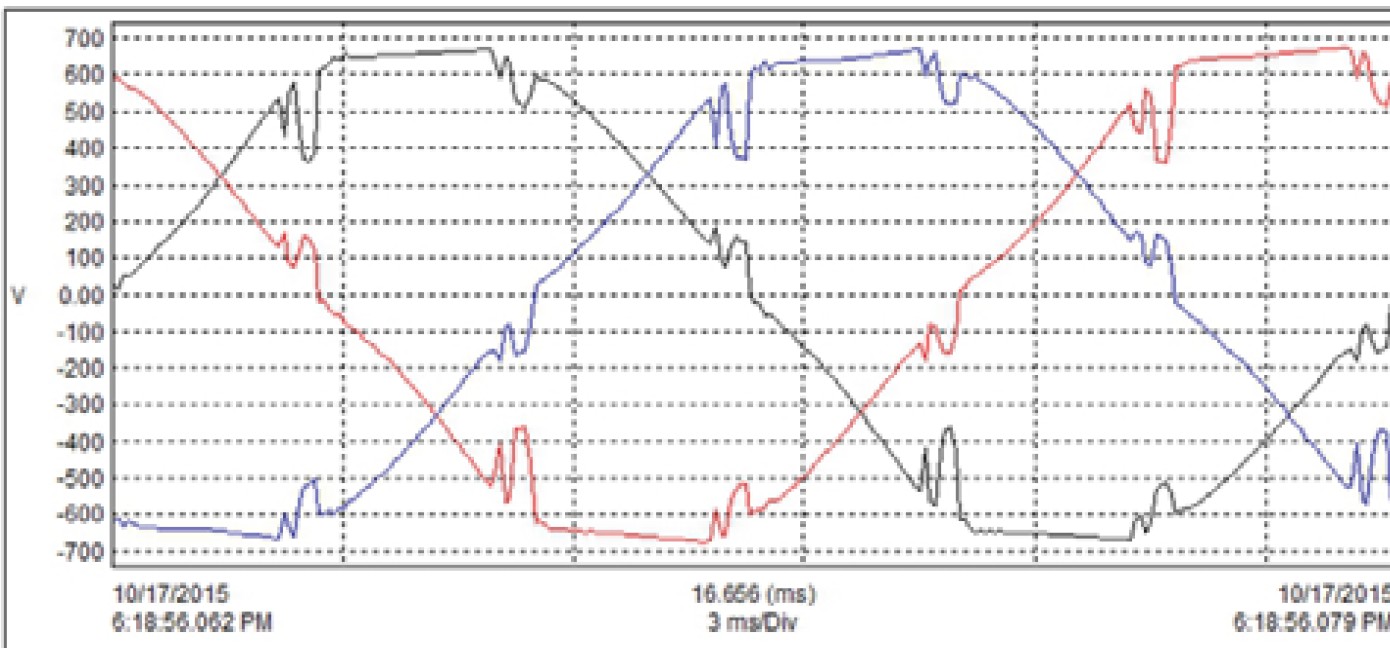
Abb.. 2. 480V-Bus-Spannungswellenform im ungünstigsten Fall der dynamischen Positionierung nach der Installation des MOS-Lineators. THDv = 7.8% — innerhalb des ABS 8% Limit. Vergleichen Sie mit dem 20.89% Vorfilterzustand in Abb. 1. Quelle: Mirus International.[1]
Der THDv des 480-V-Busses fiel aus 20.89% (Worst-Case-Vorfilter, zwei Generatoren, 100% Geschwindigkeit, Bus-Krawatte offen) zu 7.8% im äquivalenten Worst-Case-Szenario der dynamischen Positionierung nach dem Filter – unterhalb des ABS 8% Limit. Unter allen getesteten Betriebsbedingungen, THDv blieb darunter 8%.[1]
5.2 Testdaten des Bugstrahlruders – variables Lastprofil
Die 1,500 Das einziehbare Bugstrahlruder von HP wurde im gesamten Geschwindigkeitsbereich getestet, wobei alle vier Generatoren online waren. Die Ergebnisse belegen die Wirksamkeit des Filters über einen weiten Lastbereich:[1]
| Geschwindigkeitsreferenz | Generatoren | Buskrawatte | THDv | THDi | Spannung |
|---|---|---|---|---|---|
| 25% | 4 | Geschlossen | 0.54 - 0.62% | 26 - 30.7% | 603 IN |
| 50% | 4 | Geschlossen | 0.7 - 0.9% | 13.83 - 13.93% | 602 IN |
| 75% | 4 | Geschlossen | 1.23 - 1.3% | 7.4 - 7.52% | 600 IN |
| 100% | 4 | Geschlossen | 0.9 - 0.97% | 5.6 - 5.65% | 599 IN |
Beachten Sie den erhöhten THDi bei 25% Geschwindigkeit (26–30,7 %). Dies ist charakteristisch für Thyristor-Gleichstromantriebe bei niedrigen Zündwinkeln – die Stromwellenform ist bei geringer Last stärker verzerrt. Trotz dieses, Spannungsverzerrung bleibt unter 1% in diesem Betriebspunkt, da die absolute Größe der Oberschwingungsströme gering ist 25% einlegen. Dies verdeutlicht einen wichtigen Unterschied: THDi und THDv sind keine austauschbaren Messwerte – ein hoher THDi bei geringer Last bedeutet nicht unbedingt einen hohen THDv.
5.3 Testergebnisse der dynamischen Positionierung im schlimmsten Fall
| Betriebszustand | Generatoren | THDv | Spannung | Aufzeichnungen |
|---|---|---|---|---|
| Auto DP – alle Triebwerke | Alle | 2.63 - 2.84% | 479 IN | Variable Belastung |
| Statischer gegnerischer DP – alle Triebwerke 100% | Alle | 7.76 - 7.85% | 471 IN | Maximale harmonische Belastung |
| Volle Fahrt vorwärts – Backbord und Steuerbord 100% | Alle | 6.50 - 6.62% | 473 - 478 IN | Kein DDT oder TT |
Der schlimmste Fall – statischer gegnerischer DP mit allen Triebwerken 100% – erzeugte 7,76–7,85 % THDv. Dies ist das schwerwiegendste harmonische Belastungsszenario, das auf diesem Schiff möglich ist: alle Antriebe gleichzeitig unter Volllast, gegeneinander drücken, um die Position gegen Wind und Strömung zu halten. Auch unter dieser Bedingung, Das System blieb innerhalb des ABS 8% Limit.[1]
06 Die Power-Quality-Perspektive: Was diese Fallstudie veranschaulicht
6.1 Kommutierungskerbwirkung – das unterschätzte harmonische Problem
Die meisten industriellen Diskussionen über Oberschwingungen konzentrieren sich auf den Strom-THDi und den Spannungs-THDv, wie sie von einem Leistungsanalysator im stationären Zustand gemessen werden. Kommutierungskerbbildung ist eine andere Kategorie von Störungen – es handelt sich um einen zeitlichen Übergang, der mit einer vorhersagbaren Geschwindigkeit auftritt (sechsmal pro Zyklus für eine 6-Puls-Thyristorbrücke) allerdings mit Eigenschaften, die die stationäre THD-Messung nicht vollständig erfasst. Die Kerbtiefe, Breite, und Fläche sind die relevanten Parameter zur Beurteilung der Gerätekompatibilität, Dabei handelt es sich um Funktionen der Quellenimpedanz und des Antriebszündwinkels – nicht nur um die Antriebsgröße.[2]
IEEE 519 befasst sich mit dem Einkerben in seiner Tabelle 10.3 Grenzen für Kerbtiefe und Kerbfläche. ABS hat analoge Bestimmungen für Schiffsanwendungen. In beiden Fällen, Die Grenzen bestehen insbesondere deshalb, weil die Steuerelektronik anfällig für durch Kerben verursachte Zeitfehler ist – genau der Fehlermodus, der auf diesem Schiff beobachtet wurde.
6.2 THDi vs. THDv – die Leichtlastanomalie
Die Testdaten des Bugstrahlruders sind ein hervorzuhebender Punkt: bei 25% Geschwindigkeit, THDi betrug 26–30 %, während THDv darunter lag 1%. Bei 100% Geschwindigkeit, THDi war auf 5,6–5,65 % gesunken, während THDv 0,9–0,97 % betrug. Beide Messwerte verbesserten sich mit zunehmender Belastung, aber THDi startete viel höher. Dies ist kein Paradoxon – es ist eine Folge davon, wie THD als Prozentsatz des Grundtons definiert wird.
Bei leichter Belastung, Der Grundstrom ist klein. Die harmonischen Ströme, obwohl in absoluten Zahlen klein, sind ein großer Teil eines kleinen Grundtons und erzeugen einen hohen THDi. Die gleichen kleinen absoluten harmonischen Ströme fließen durch die Quellenimpedanz und erzeugen eine kleine absolute Spannungsverzerrung – daher einen niedrigen THDv. Der praktische Unterricht: Die Bewertung der harmonischen Auswirkungen auf das Netzwerk erfordert die Betrachtung des THDV und der absoluten harmonischen Stromstärken, nicht THDi allein.
6.3 Simulation vor der Installation – der richtige Ablauf
Diese Fallstudie, wie der Fall der Plains-All-American-Pipeline, demonstriert den Wert der harmonischen Simulation vor der Filterbeschaffung. Der SOLV™ Modell vorhergesagt 5.8% THDv-Nachfilter auf der Port-Seite-Schaltung; Das Ergebnis der Feldmessung war 7.8% im schlimmsten Fall eines vollständigen DP-Szenarios – eine vernünftige Vereinbarung angesichts der zusätzlichen Triebwerkslasten, die in der reinen Backbordsimulation nicht vorhanden sind. Die Simulation gab genügend Sicherheit, um den richtigen Filtertyp und die richtige Filtergröße festzulegen, Vermeidung eines teuren Versuch-und-Irrtum-Ansatzes auf einem Arbeitsschiff.
6.4 Anbindung an die IPQDF-Serie
Die beiden vorherigen Fallstudien dieser Serie (ESP-Sinusfilter, Plains All-American-Pipeline) befasste sich mit 6-Puls-PWM-Antrieben bzw. Thyristor-Gleichstromantrieben, beides in landgestützten Inselsystemen. Diese Fallstudie erweitert das Bild auf Schiffsanwendungen und führt Kommutierungskerbwirkung als einen Fehlermechanismus ein, der sich von anhaltender harmonischer Erwärmung unterscheidet. Zusammen, Diese drei Fallstudien decken die Hauptkategorien von Oberschwingungsproblemen ab, die in von Generatoren gespeisten Industrie- und Schiffsanlagen auftreten.
Die technischen Artikel dieser Serie (Artikel 1–3) Befassen Sie sich mit denselben harmonischen Phänomenen von der theoretischen Seite aus – Stromspektren, Netzwerkinteraktion, motorische Effekte. Die Fallstudien zeigen, was passiert, wenn diese Phänomene in realen Systemen nicht abgemildert werden. Die Kluft zwischen Theorie und Konsequenz wird normalerweise in ausgefallenen Geräten und entgangenen Einnahmen gemessen.
Referenzen
- [1] Mirus International Inc., “Fallstudie zum MOS-Lineator: Die Reduzierung von Oberschwingungen im Seeverkehr rettet das Programm für Offshore-Serviceschiffe,” Anwendungsfallstudie, Brampton, Ontario, Kanada, 2016. Verfügbar: mirusinternational.com/moslineator
- [2] IEEE Std 519-2022, “IEEE-Standard für harmonische Kontrolle in elektrischen Energiesystemen,” IEEE, New York, NY, 2022. (Abschnitt zur Spannungskerbung, Tabelle 10.3.)
- [3] Amerikanisches Schifffahrtsbüro (ABS), “Leitlinien zur Kontrolle von Oberschwingungen in elektrischen Energiesystemen,” ABS, Houston, TX.